d2c
将模型从离散时间转换为连续时间
说明
示例
创建以下离散时间传递函数:
H = tf([1 -1],[1 1 0.3],0.1);
模型的采样时间为 。
推导出连续时间、零阶保持等效模型。
Hc = d2c(H)
Hc = 121.7 s + 1.758e-12 --------------------- s^2 + 12.04 s + 776.7 Continuous-time transfer function. Model Properties
使用默认的零阶保持方法和采样时间 0.1 秒对得到的模型 Hc 进行离散化,以返回原始离散模型 H。
c2d(Hc,0.1)
ans =
z - 1
-------------
z^2 + z + 0.3
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
使用突斯汀逼近方法将 H 转换为连续时间模型。
Hc2 = d2c(H,'tustin');对得到的模型 Hc2 进行离散化,以返回原始离散时间模型 H。
c2d(Hc2,0.1,'tustin');估计离散时间传递函数模型,并将其转换为连续时间模型。
load iddata1 sys1d = tfest(z1,2,'Ts',0.1); sys1c = d2c(sys1d,'zoh');
估计连续时间传递函数模型。
sys2c = tfest(z1,2);
比较 sys1c 和直接估计的连续时间模型 sys2c 的响应。
compare(z1,sys1c,sys2c)
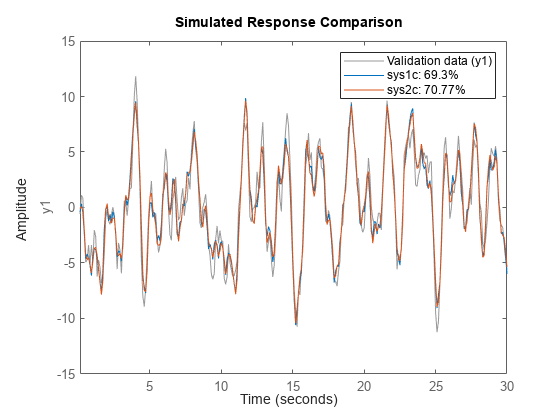
这两个系统几乎完全相同。
将辨识的离散时间传递函数模型转换为连续时间模型。
load iddata1 sysd = tfest(z1,2,'Ts',0.1); sysc = d2c(sysd,'zoh');
sys1c 没有协方差信息。d2c 操作会导致辨识模型的协方差数据丢失。
使用相同的估计命令和估计数据,通过零次迭代更新来重新生成协方差信息。
opt = tfestOptions; opt.SearchOptions.MaxIterations = 0; sys1c = tfest(z1,sysc,opt);
分析对频率响应不确定性的影响。
h = bodeplot(sysd,sys1c); showConfidence(h,3)
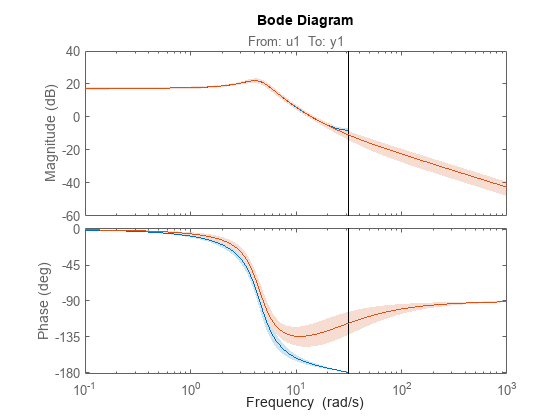
在达到奈奎斯特频率之前,sys1c 和 sysd 的不确定性是可比的。然而,sys1c 在估计数据未提供任何信息的频率范围内表现出较大的不确定性。
如果您无法获取估计数据,可以使用 translatecov 命令,该命令基于高斯近似公式在模型类型转换操作中进行协方差的转换。
输入参数
输出参量
参考
[1] Franklin, G.F., Powell,D.J., and Workman, M.L., Digital Control of Dynamic Systems (3rd Edition), Prentice Hall, 1997.
[2] Kollár, I., G.F. Franklin, and R. Pintelon, "On the Equivalence of z-domain and s-domain Models in System Identification," Proceedings of the IEEE® Instrumentation and Measurement Technology Conference, Brussels, Belgium, June, 1996, Vol. 1, pp. 14-19.
版本历史记录
在 R2006a 之前推出
另请参阅
d2cOptions | c2d | translatecov (System Identification Toolbox) | logm | 转换模型速率