LPV 和 LTV 模型
线性参数变化和线性时变模型
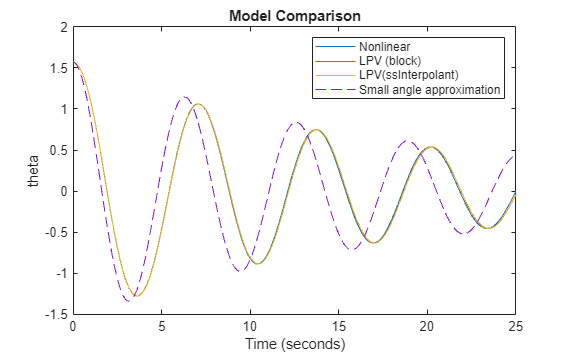
创建、操作、分析和仿真线性参数变化 (LPV) 和线性时变模型 (LTV)。这些模型可以逼近非线性系统,并允许您高效地将线性设计方法应用于非线性模型。
借助可用的功能,您可以:
基于数学表达式创建 LPV 或 LTV 模型。
创建 LPV 或 LTV 模型,在工况网格上进行线性化结果插值。
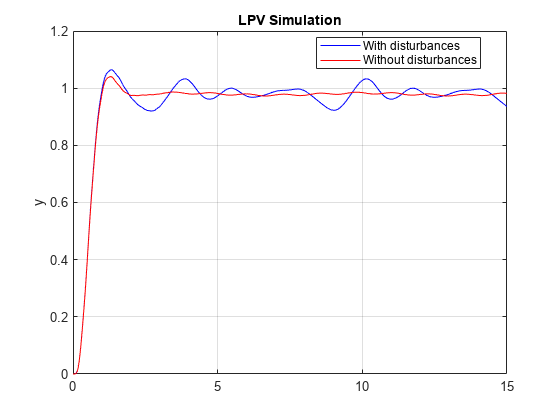
仿真时间响应。
指定不同模型之间以及与 LTI 模型之间的基于信号的连接。
在参数网格上对动态特性进行采样以获得局部 LTI 逼近。
离散化和重采样 LPV 或 LTV 模型。
函数
模块
主题
LTV 和 LPV 模型基础知识
- LTV and LPV Modeling
Fundamentals of linear time-varying and parameter-varying models. - Using LTV and LPV Models in MATLAB and Simulink
Create, analyze, and simulate linear parameter-varying and linear time-varying state-space models.
使用解析 LTV 和 LPV 模型
- LPV Model of Bouncing Ball
Construct an LPV representation of a system that exhibits multi-mode dynamics. - LPV Model of Engine Throttle
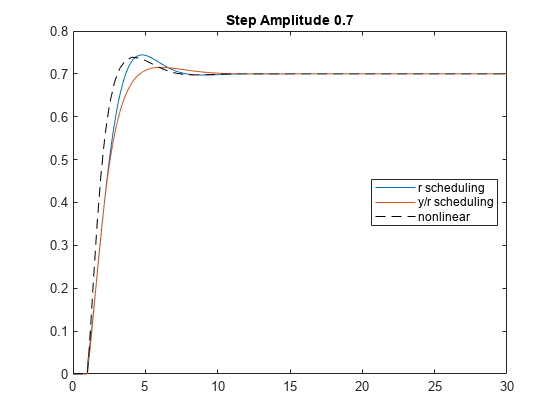
Model engine throttle behavior as a linear parameter-varying system. - Analysis of Gain-Scheduled PI Controller
Analyze gain-scheduled PI control of an LPV system. - LPV Model of Magnetic Levitation System
Create analytic LPV model from linearized equations of magnetic levitation system. - Gain-Scheduled LQG Controller
Demonstrate instability in gain-scheduled control when parameters vary too quickly.
使用网格化 LTV 和 LPV 模型
- LPV Approximation of Boost Converter Model
Obtain linear parameter-varying approximation of a nonlinear Simscape™ Electrical™ model. - Design and Validate Gain-Scheduled Controller for Nonlinear Aircraft Pitch Dynamics
Approximate nonlinear behavior of airframe pitch axis dynamics using linear parameter-varying model. - LPV Model of Magnetic Levitation Model from Batch Linearization Results
Create a gridded LPV model from batch linearization results of a magnetic levitation model. - Reduced Order Modeling of a Nonlinear Dynamical System as an Identified Linear Parameter Varying Model (System Identification Toolbox)
Identify a linear parameter varying reduced order model of a cascade of nonlinear mass-spring-damper systems.
精选示例
Control Design for Spinning Disks
Design a gain-scheduled H2 controller for a coupled-spinning disks model.
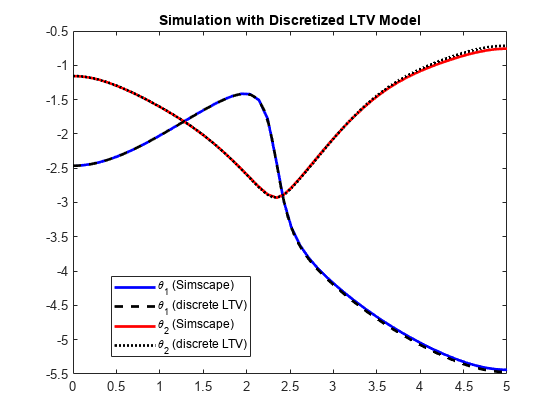
LTV Model of Two-Link Robot
Obtain a linear time-varying state-space model of a two-link robot along a trajectory.
Hidden Couplings in Gain-Scheduled Control
Demonstrate hidden couplings in gain-scheduled control.
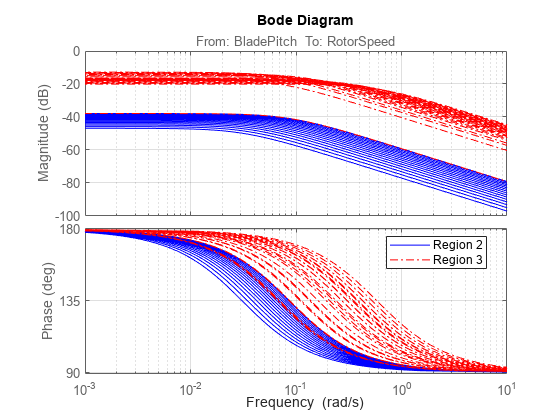
Control Design for Wind Turbine
Design a gain-scheduled controller for a linear parameter-varying model of wind turbine.
Create LPV Pendulum Model Using Batch Linearization
Create LPV model of Pendulum Using batch linearization results.