Hidden Couplings in Gain-Scheduled Control
This example illustrates the hidden couplings that can arise in gain-scheduled control depending on controller configuration. This corresponds to examples 2, 8, 9, and 11 in [1].
LPV Plant
The following equations define the nonlinear plant.
There is a collection of equilibrium points parameterized by .
Linearization around these equilibrium points yields the LPV model.
Use lpvss to construct this LPV plant. The data function is defined in the file lpvHCModel.m. Since is infinite for , clip to the range [–0.99,0.99] to stay away from singularities.
pmax = 0.99; G = lpvss('p',@(t,p) lpvHCModel(t,p,pmax),'StateName','x');
Gain-Scheduled PI Controller
The gain-scheduled Proportional-Integral (PI) controller is designed to achieve a closed loop damping ratio and natural frequency at each point in the domain. You can construct this controller in two different forms.
Controller , with the integral gain at the integrator input:
Controller , with the integral gain at the integrator output:
These forms are equivalent when is constant. However, the two forms have different input/output responses when the parameter varies in time. This example compares these two options in terms of closed-loop performance.
This example provides the code for these two controllers in the files hcKinFCN.m and hcKoutFCN.m. Use lpvss to construct the two controllers.
Kin = lpvss('p',@(t,p) hcKinFCN(t,p,pmax)); Kout = lpvss('p',@(t,p) hcKoutFCN(t,p,pmax));
Use feedback to construct LPV models of the closed-loop systems for each controller.
CLin = feedback(G*Kin,1); CLout = feedback(G*Kout,1);
LTI Analysis
Evaluate this closed-loop response for several fixed values of .
Sample the LPV system for five values of .
Nvals = 5; pvals = linspace(-0.9,0.9,Nvals); CLinvals = sample(CLin,[],pvals); CLoutvals = sample(CLout,[],pvals);
Plot the Bode response for fixed values of .
bode(CLinvals,'b',CLoutvals,'r--',{1e-2,1e1});

The location of the integral gain does not affect the controller when is constant. Hence, the two feedback loops have identical responses.
LPV Simulation
Compute the step response of the closed-loop LPV models for the two step amplitudes rstep = 0.3 and rstep = 0.7. This approximates the tracking performance of each gain-scheduled controller against the nonlinear plant. Both controllers use as the scheduling variable.
The feedback loop is locally unstable for with Kout while it remains locally stable for all for with Kin [1]. Try reproducing these results with an LPV simulation.
Tf = 30; tsim = linspace(0,Tf,1000); xinit = [0;0]; rstep = 0.3; Config = RespConfig('Amplitude',rstep,'Delay',1,'InitialState',xinit); pFcn = @(t,x,u) tanh(x(1)); step(CLin,CLout,tsim,pFcn,Config), grid title('Step Amplitude 0.3') legend('Kin','Kout','location','Best')

rstep = 0.7; Config = RespConfig('Amplitude',rstep,'Delay',1,'InitialState',xinit); step(CLin,CLout,tsim,pFcn,Config), grid title('Step Amplitude 0.7') legend('Kin','Kout','location','Best')
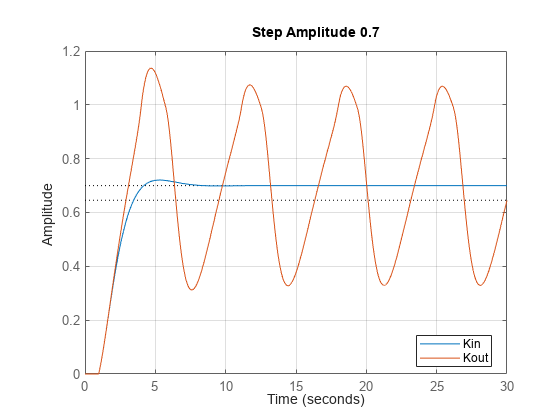
The LPV simulation confirms that the feedback loop remains stable with Kin (integral gain at the integrator input) but exhibits a limit cycle with Kout for large setpoint changes. This cycle is only an approximation of the true nonlinear behavior since the output should never exceed 1. The LPV plant model is locally linear and cannot capture the saturating behavior of the function .
To further assess the fidelity of the LPV model, compare with a nonlinear simulation using the true nonlinear plant.
Open the Simulink® model of the closed-loop system.
mdl = 'HiddenCouplings';
open_system(mdl)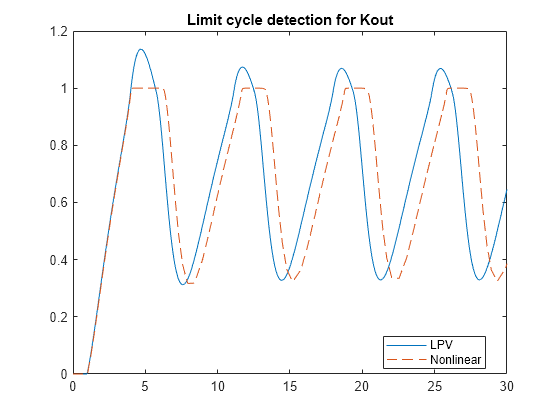
Simulate the response with Ki at integrator output.
usey = 1;
useKout = 1;
simout = sim('HiddenCouplings',Tf);Compare the LPV and nonlinear responses with the controller Kout.
y = step(CLout,tsim,pFcn,Config); plot(tsim,y,simout.tout,simout.y,'--') title('Limit cycle detection for Kout') legend('LPV','Nonlinear','location','Best')

As expected, results don't match exactly due to the strong nonlinearity of . Still, the LPV simulation correctly predicts the limit cycle with approximately the right period.
Scheduling on Reference Signal
Scheduling on creates an additional feedback loop between the plant and controller via the scheduling function. In other words, the closed-loop model simulated by step is quasi-LPV and the state-dependent scheduling causes instability. Since the output is meant to track the reference signal , an alternative strategy is to schedule the controller on , which is a truly exogenous signal. You can easily compare the two strategies by replacing the parameter trajectory with in the step command.
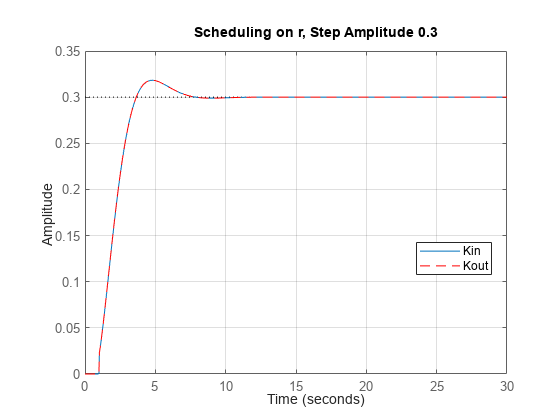
rstep = 0.3; Config = RespConfig('Amplitude',rstep,'Delay',1,'InitialState',xinit); r = rstep*(tsim>=1); step(CLin,CLout,'r--',tsim,r,Config), grid title('Scheduling on r, Step Amplitude 0.3') legend('Kin','Kout','location','Best')
Simulate with a larger step amplitude.
rstep = 0.7; Config = RespConfig('Amplitude',rstep,'Delay',1,'InitialState',xinit); step(CLin,CLout,'r--',tsim,r,Config), grid title('Scheduling on r, Step Amplitude 0.7') legend('Kin','Kout','location','Best')

Both controllers now remain stable and have identical performance. This is because is piecewise constant, which is close enough to the LTI case when both controllers are interchangeable. Save the results with Kout for comparison with the hybrid scheme discussed next.
y = step(CLout,tsim,r,Config);
Hybrid Approach
You can also use a hybrid approach where the LPV plant depends on and the PI controller is scheduled in . To try this strategy, construct the LPV controller with a different parameter called pc:
Kout = lpvss('pc',@(t,p) hcKoutFCN(t,p,pmax));
CLout = feedback(G*Kout,1);The closed-loop model now depends on two parameters p and pc. Set p to and pc to and simulate the response.
pFcn = @(t,x,u) [tanh(x(1)) ; interp1(tsim,r,t)]; yh = step(CLout,tsim,pFcn,Config);
Finally, run a nonlinear simulation with the true plant and a PI controller scheduled on with at the integrator output.
usey = 0; useKout = 1;
simout = sim('HiddenCouplings',Tf);Compare the -scheduling and hybrid scheduling schemes with the true nonlinear response.
plot(tsim,y,tsim,yh,simout.tout,simout.y,'k--') title('Step Amplitude 0.7') legend('r scheduling','y/r scheduling','nonlinear','location','Best')
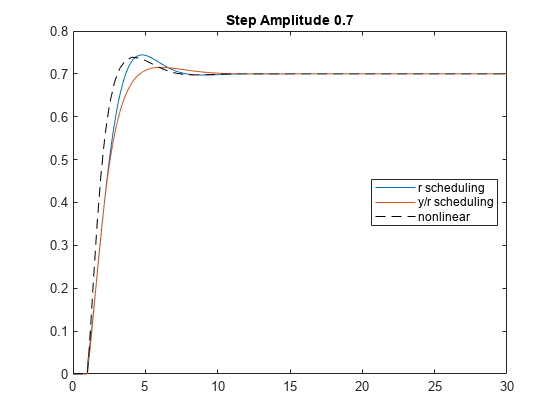
Here scheduling both the plant and controller on yields a better approximation of the nonlinear response.
Plant and Controller Data Functions
type lpvHCModelfunction [A,B,C,D,E,dx0,x0,u0,y0,Delays] = lpvHCModel(~,p,pmax) % Plant model p = max(-pmax,min(p,pmax)); tau = atanh(p); A = -1; B = 1; C = 1-p^2; D = 0; E = []; dx0 = []; x0 = tau; u0 = tau; y0 = p; Delays = [];
type hcKinFCNfunction [A,B,C,D,E,dx0,x0,u0,y0,Delays] = hcKinFCN(~,p,pmax)
% PI Gains
if abs(p)< pmax
Kp = 1/3/(1-p^2);
Ki = 1/(1-p^2);
else
% Protect against |p|>=1
Kp = 1/3/(1-pmax^2);
Ki = 1/(1-pmax^2);
end
% State-space and offset data: Ki at the input
A = 0;
B = Ki;
C = 1;
D = Kp;
E = [];
dx0 = [];
x0 = [];
u0 = [];
y0 = [];
Delays = [];
type hcKoutFCNfunction [A,B,C,D,E,dx0,x0,u0,y0,Delays] = hcKoutFCN(~,p,pmax)
% PI Gains
if abs(p)< pmax
Kp = 1/3/(1-p^2);
Ki = 1/(1-p^2);
else
% Protect against |p|>=1
Kp = 1/3/(1-pmax^2);
Ki = 1/(1-pmax^2);
end
% State-space and offset data: Ki at the output
A = 0;
B = 1;
C = Ki;
D = Kp;
E = [];
dx0 = [];
x0 = [];
u0 = [];
y0 = [];
Delays = [];
References
Rugh, Wilson J., and Jeff S. Shamma. “Research on Gain Scheduling.” Automatica 36, no. 10 (October 2000): 1401–25. https://doi.org/10.1016/S0005-1098(00)00058-3.