LPV System
对线性参数变化 (LPV) 系统进行仿真
库:
Control System Toolbox /
Linear Parameter Varying
描述
线性参数变化 (LPV) 系统是一种线性状态空间模型,其动态特性作为某些称为调度参数的时变参数的函数而变化。在 MATLAB® 中,LPV 模型表示为使用参数相关系数的状态空间形式。
在数学上,您可以将 LPV 系统表示如下。
其中:
u(t) 是输入
y(t) 是输出
x(t) 是具有初始值 xinit 的模型状态
是连续时间系统的状态导数向量 ,是离散时间系统的状态更新向量 x[k+1]。此处,k 是对采样周期数 Ts 进行计数的整数索引。
A(p)、B(p)、C(p) 和 D(p) 是由调度参数向量 p 参数化的状态空间矩阵。
参数 p = p(t) 是模型的输入和状态的可测量函数。它们可以是标量,也可以是由几个参数组成的向量。这组调度参数定义调度空间,在该空间上定义 LPV 模型。
dx0(p)、x0(p)、u0(p) 和 y0(p) 是在给定参数值 p = p(t) 或 p[k] 处的 、x(t)、u(t) 和 y(t) 值中的偏移量。
当调用
linearize(Simulink Control Design) 或getIOTransfer(Simulink Control Design) 等函数时,您可以通过返回额外的线性化信息来获得偏移量。有关示例,请参阅LPV Approximation of Boost Converter Model (Simulink Control Design)。
小心
避免使 C(p) 和 D(p) 依赖系统输出 y。否则,得到的状态空间方程 y = C(y)x + D(y)u 会创建一个代数环,因为计算输出值 y 需要知道输出值。这种代数环容易带来不稳定性和发散性。在这种情况下,请尝试用时间 t、模块输入 u 和状态输出 x 来表示 C 和 D。
出于类似的原因,请避免根据 dx 输出来调度 A(p) 和 B(p)。请注意,当 y 是状态和输入的固定组合时(即当 y = Cx + Du 时,其中 C 和 D 是常量矩阵),A 和 B 依赖于 y 是安全的。
该模块实现 LPV 系统的基于网格的表示。您需要为调度参数选择网格值。在每个值 p = p* 处,将对应的线性系统指定为状态空间(ss 或 idss (System Identification Toolbox))模型对象。使用生成的状态空间模型数组来配置 LPV System 模块。
该模块接受具有工作点信息的状态空间模型数组。该模块从 LTI 数组的 SamplingGrid 属性中提取有关调度变量的信息。调度变量定义 LPV 模型的网格。它们是标量值,可以是时间、输入和状态的函数,也可以是常量。它们用于捕获操作空间中的局部动态特性。软件对这些变量的值进行插值。该模块对此数组采用数据内插和外插方法来进行仿真。
示例
假设有一个包含 2 个输入、3 个输出、4 个状态的 LPV 模型。使用输入 u(2) 和状态 x(1) 作为调度参数。如下图所示配置 Simulink® 模型。

假设有一个线性质量-弹簧-阻尼器系统,其质量随外部加载命令函数而变化。控制方程如下:
此处, 是取决于外部命令 的质量, 是阻尼比, 是弹簧的刚度, 是强制输入。 是质量在给定时间 的位置。如果 是固定值,则系统是线性系统,表示为
,
其中 是状态向量, 是给定 值的质量的值。
在此示例中,您要在 1 到 10 伏的输入值范围内研究模型行为。对于 的每个值,测量质量并计算系统的线性表示。假设质量与输入的关系是 。如果 u 值的范围是从 1 到 10,将产生以下线性系统数组。
c = 5; k = 300; u = 1:10; m = 10*u + 0.1*u.^2; for i = 1:length(u) A = [0 1; -k/m(i), -c/m(i)]; B = [0; 1/m(i)]; C = [1 0]; sys(:,:,i) = ss(A,B,C,0); end
变量 是调度输入。将以下信息添加到模型中。
sys.SamplingGrid = struct('LoadCommand',u);配置 LPV System 模块:
在状态空间数组字段中键入
sys。将输入端口
par连接到一维源信号,该信号生成加载命令的值。如果源提供 1 到 10 之间的值,模块使用插值来计算给定时间实例的线性模型。否则,该模块使用外插。

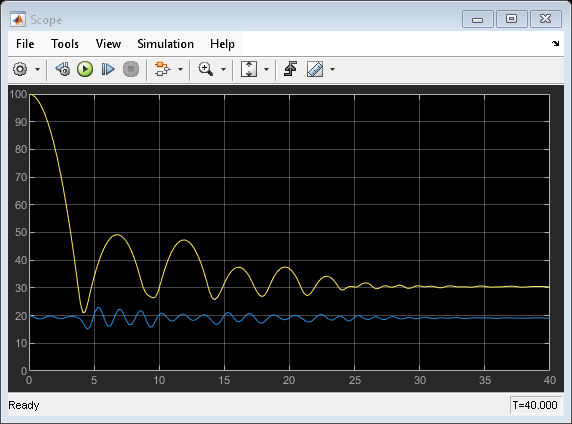
对 LPV 模型进行仿真,将恒定强制输入设置为 100 N 且加载命令调度变量设置为随机值。
model = "simMSDLPV";
open_system(model);
此示例说明如何使用 LPV System 模块仿真发动机转速的线性参数变化 (LPV) 模型。LPV System 模块对一个状态空间数组进行插值以进行 LPV 响应建模。通常,您可以通过在一系列工作条件下批量线性化非线性模型来获得这样一个数组。此示例提供 scdspeedlpvData 中发动机转速模型的线性化结果。有关线性化此模型的详细信息,请参阅发动机转速模型线性化 (Simulink Control Design)。
打开模型。
model = "scdspeedLPVCompare";
open_system(model);
加载用于实现 LPV 模型的线性化结果。
load scdspeedlpvData.matLPV 模型是在 LPV 模型子系统下实现的。
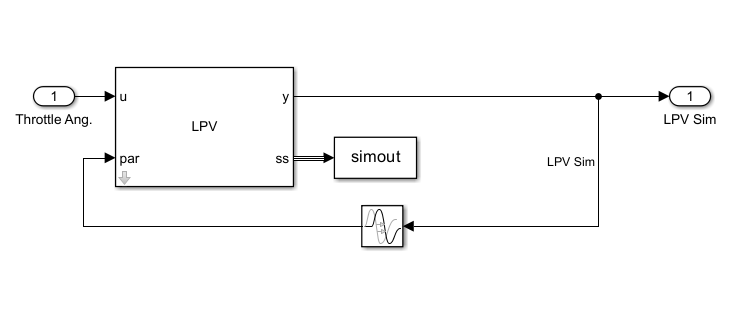
LPV System 模块将节气门角度作为输入,并将转速输出作为调度变量。模块参数的配置如下图所示。此处,状态空间数组 sys 和偏移量是通过批量线性化非线性模型获得的。

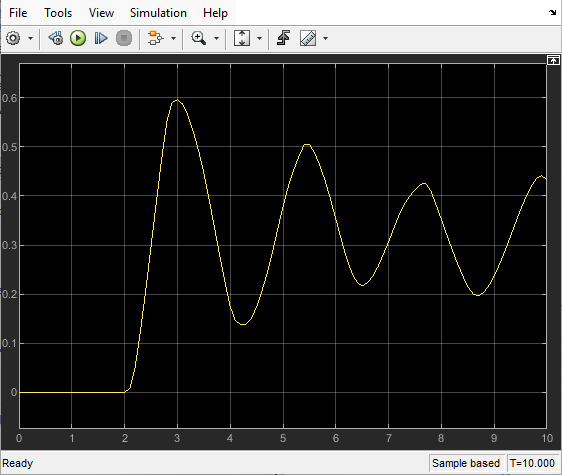
仿真模型并绘制响应比较图。
sim(model);
plot(logsOut{1}.Values.Time,logsOut{1}.Values.Data)
grid on
legend("Nonlinear sim","LPV sim","LTI sim",Location="best")
LPV 模型提供非线性响应的良好逼近。
扩展示例
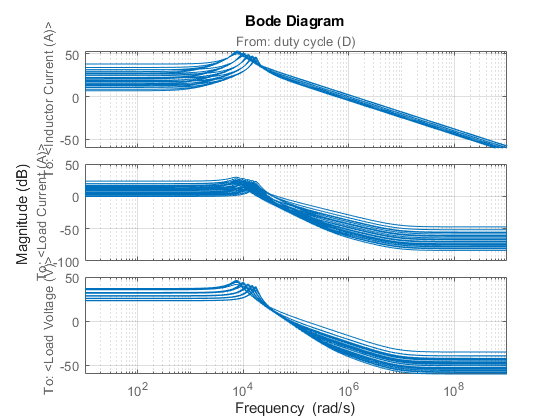
LPV Approximation of Boost Converter Model
Approximate a nonlinear Simscape™ Electrical™ model using a linear parameter varying model.
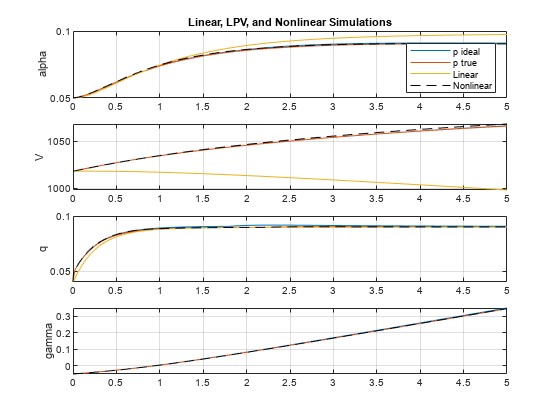
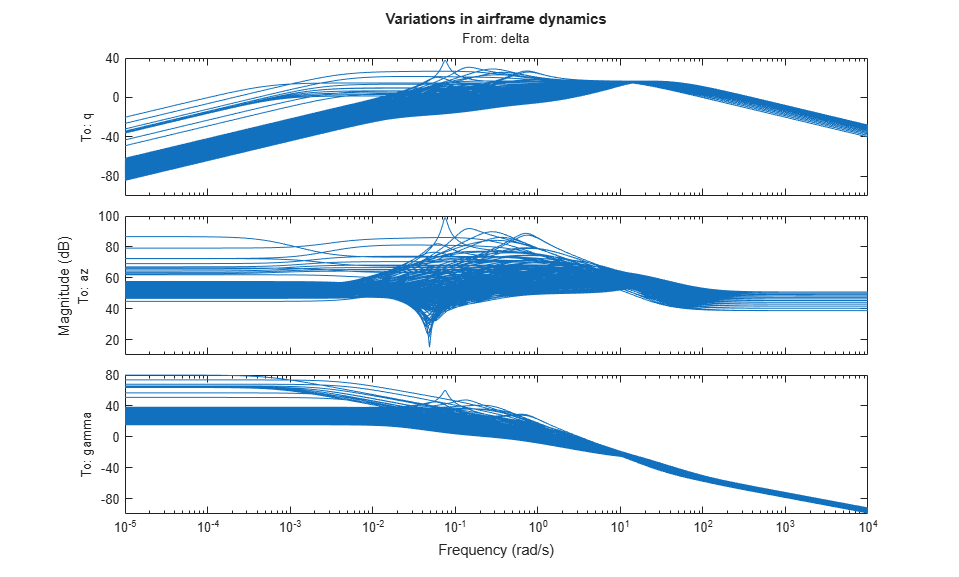
Design and Validate Gain-Scheduled Controller for Nonlinear Aircraft Pitch Dynamics
Approximate nonlinear behavior of airframe pitch axis dynamics using linear parameter-varying model.
Using LTI Arrays for Simulating Multi-Mode Dynamics
Construct a Linear Parameter Varying (LPV) representation of a system that exhibits multi-mode dynamics.
Approximate Nonlinear Behavior Using Array of LTI Systems
You can use linear parameter varying models to approximate the dynamics of nonlinear systems.