series
两个模型的串行连接
说明
示例
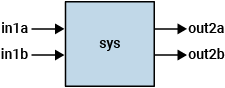
创建两个 SISO 系统,一个是状态空间模型,另一个是传递函数。
sys1 = rss(3); sys2 = tf(1,[1 1 1]);
将这两个系统串行连接起来。
sys = series(sys1,sys2); size(sys)
State-space model with 1 outputs, 1 inputs, and 5 states.
将传递函数与状态空间模型连接起来会得到另一个状态空间模型。有关组合不同模型类型的结果的详细信息,请参阅Rules That Determine Model Type。
串行互连等效于乘积 sys2*sys1。通过检查频率响应来验证这种等效性。
sysm = sys2*sys1; bodeplot(sys,'-',sysm,'--')

将两个 MIMO 系统串行连接起来。当 sys1 的输出数目等于 sys2 的输入数目时,您可以将所有 sys1 输出连接到所有 sys2 输入。
sys1 = rss(3,2,3); sys2 = rss(3,3,2); sys = series(sys1,sys2);
得到的系统的输入数目与 sys1 相同,输出数目与 sys2 相同。
size(sys)
State-space model with 3 outputs, 3 inputs, and 6 states.
您可以通过为要连接的信号分配匹配的名称来形成串行连接。从四输出、双输入系统 sys1 和双输出、三输入系统 sys2 开始,形成图中所示的串行连接。
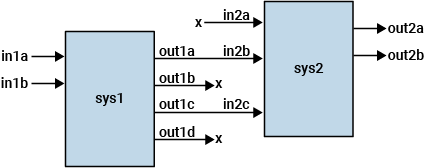
创建这两个系统的状态空间模型,并为输入和输出信号命名。
% sys1: 4-output, 2-input sys1 = rss(4,4,2); sys1.InputName = ["in1a","in1b"]; sys1.OutputName = ["out1a","out1b","out1c","out1d"]; % sys2: 2-output, 3-input sys2 = rss(3,2,3); sys2.InputName = ["in2a","in2b","in2c"]; sys2.OutputName = ["out2a","out2b"];
在图中所示的互连中,sys1 的 out1a 和 out1c 分别连接到 in2b 和 in2c。更改信号名称,使连接信号的名称相匹配。
sys1.OutputName = ["ua","out1b","ub","out1d"]; sys2.InputName = ["in2a","ua","ub"];
通过在指定 name 标志的情况下调用 series 来形成连接。
sys = series(sys1,sys2,"name");检查 sys 的维度、输入和输出,以确认连接与图中的连接一致。
size(sys)
State-space model with 2 outputs, 2 inputs, and 7 states.
sys.InputName
ans = 2×1 cell
{'in1a'}
{'in1b'}
sys.OutputName
ans = 2×1 cell
{'out2a'}
{'out2b'}
正如预期的那样,得到的 sys 具有两个输出和两个输入,分别对应于 sys2 的输出和 sys1 的输入。
sys 会丢弃 sys2 的未连接输入和 sys1 的未连接输出。要形成这种互连同时保留所有输入和输出,请改用 connect,指定要在得到的系统中保留的所有输入和输出。
sysc = connect(sys1,sys2,["in1a","in1b","in2a"],["out2a","out2b","out1b","out1d"]); size(sysc)
State-space model with 4 outputs, 3 inputs, and 7 states.
sysc.InputName
ans = 3×1 cell
{'in1a'}
{'in1b'}
{'in2a'}
sysc.OutputName
ans = 4×1 cell
{'out2a'}
{'out2b'}
{'out1b'}
{'out1d'}
您可以通过指定要连接信号的索引,使用模型输入和输出的子集形成系列互连。从四输出、双输入系统 sys1 和双输出、三输入系统 sys2 开始,形成图中所示的串行连接。

创建这两个系统的状态空间模型。
% sys1: 4-output, 2-input sys1 = rss(4,4,2); % sys2: 2-output, 3-input sys2 = rss(3,2,3);
要形成串行连接,请创建向量来指定要连接的 sys1 的输出和 sys2 的相应输入。在上图中,sys1 的第一个和第三个输出分别连接到 sys2 的第二个和第三个输入。因此,请按如下方式指定索引。
out1 = [1 3]; % out1a and out1c in2 = [2 3]; % in2b and in2c
形成连接并检查输出的大小。
sys = series(sys1,sys2,out1,in2); size(sys)
State-space model with 2 outputs, 2 inputs, and 7 states.
正如预期的那样,得到的 sys 具有两个输出和两个输入,分别对应于 sys2 的输出和 sys1 的输入。sys 会丢弃 sys2 的未连接输入和 sys1 的未连接输出。要形成这种互连同时保留所有输入和输出,请使用 connect。
输入参数
输出参量
版本历史记录
在 R2006a 之前推出