ultidyn
Uncertain linear time-invariant dynamics
Description
ultidyn objects represent uncertain linear time-invariant
dynamics whose only known attributes are bounds on their frequency response. Combine
ultidyn objects with other dynamic system models and uncertain elements to
model systems with uncertain dynamics, represented by uss or
genss models.
Creation
Description
H = ultidyn(name,iosize)ultidyn object modeling uncertain dynamics with a gain bound of
1 and output and input dimensions determined by iosize.
H = ultidyn(name,iosize,Name,Value)"Bound" to 0.1.
Input Arguments
Properties
Object Functions
Many functions that work on numeric LTI models also work on uncertain control design
blocks such as ultidyn. These include model interconnection functions such as
connect and feedback, and linear analysis
functions such as bode and stepinfo. Some functions
that generate plots, such as bode and step, plot
random samples of the uncertain model to give you a sense of the distribution of uncertain
dynamics. When you use these commands to return data, however, they operate on the nominal
value of the system only. The following lists contain a representative subset of the functions
you can use with ultidyn models.
Examples
To model frequency-dependent uncertainty levels, create a ultidyn object and multiply it by a suitable shaping filter. For instance, suppose that you know your system dynamics fairly well at low frequencies, and do not want to introduce uncertainty in that regime, but you have less understanding of the high-frequency dynamis. Create an uncertain dynamic system model representing an uncertainty with gain of 0.1 at low frequencies and gain of 10 at high frequencies.
First, create a SISO ultidyn block with gain less than 1 at all frequencies.
H = ultidyn("H",1)Uncertain LTI dynamics "H" with 1 outputs, 1 inputs, and gain less than 1. Block Properties
Next, create a weighting function with the gain profile you want, starting a 0.1 and increasing to 10.
W = tf([1 .1],[.1 1]);
Multiply H by the weighting function to create the desired dynamic uncertainty. Examine random samples of the resulting uncertain model to confirm that the gain of the uncertain dynamics has the desired frequency-dependent bound.
Delta = W*H; bodemag(Delta)
You can combine Delta with other models to introduce the dynamic uncertainty to your system. For instance, suppose you can model your system with a state-space model with the following nominal value.
A = [-5 10;-10 -5]; B = [1 0;0 1]; C = [1 10;-10 1]; D = 0; Pnom = ss(A,B,C,D);
Introduce Delta as an additive uncertainty.
Padd = Pnom + Delta;
Or, introduce Delta as multiplicative uncertainty on the input to Pnom.
Pmult = Pnom*(1+Delta);
Both Padd and Pmult are uss models with one uncertain block, the ultidyn block H.
Create a ultidyn object with internal name 'H', norm bounded by 7, with three inputs and two outputs.
H = ultidyn('H',[2 3],'Bound',7)
Uncertain LTI dynamics "H" with 2 outputs, 3 inputs, and gain less than 7. Block Properties
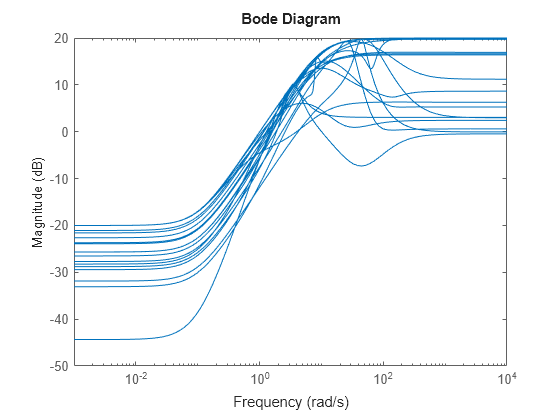
Typically, when you use uncertain dynamics, you apply a weighting function to emphasize the uncertain contribution in a certain bandwidth. For instance, suppose that the behavior of your system is modestly uncertain (say 10%) at low frequencies, while the high-frequency behavior beyond 20 rad/s is not accurately modeled. Use makeweight to create a shaping filter that captures this behavior.
W = makeweight(.1,20,50); bodemag(W)

Apply the weighting filter at the block outputs. Examine samples of the unmodeled dynamics.
Hw = blkdiag(W,W)*H; bodemag(Hw)

Create a scalar ultidyn object with an internal name 'B', whose frequency response has a real part greater than 2.5.
B = ultidyn('B',[1 1],'Type','PositiveReal','Bound',2.5)
Uncertain LTI dynamics "B" with 1 outputs, 1 inputs, and positive real bound of 2.5. Block Properties
Change the SampleStateDimension to 5, and plot the Nyquist plot of 30 random samples.
B.SampleStateDimension = 5; nyquist(usample(B,30))
