psample
Syntax
Description
Examples
You can sample the dynamics of an LTV model over a point or a vector of values to obtain affine dynamics for a given time.
Consider a model defined by the data function ltvssDataFcn.m.
Create an LTV model.
ltvSys = ltvss(@ltvssDataFcn)
Continuous-time state-space LTV model with 1 outputs, 1 inputs, and 1 states. Model Properties
Define a set of times values to sample this model over.
t = 5:0.5:10;
Use the psample command to obtain an array of ss models.
ssArray = psample(ltvSys,t); size(ssArray)
1x11 array of state-space models. Each model has 1 outputs, 1 inputs, and 1 states.
In ssArray, the SamplingGrid property tracks the dependence of each model on time and the Offsets property contains the offset values as a function of time.
ssArray.SamplingGrid
ans = struct with fields:
Time: [5 5.5000 6 6.5000 7 7.5000 8 8.5000 9 9.5000 10]
ssArray.Offsets
ans=1×11 struct array with fields:
dx
x
u
y
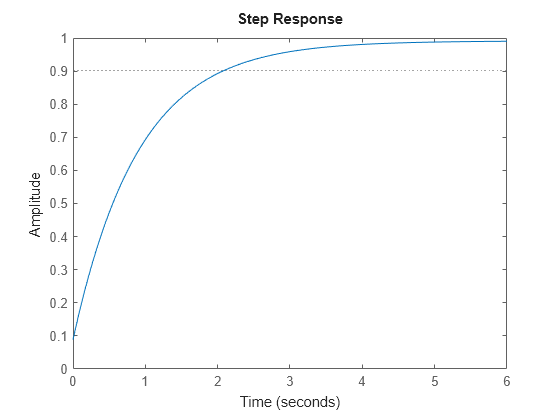
Plot the step response of the fourth model in the array.
step(ssArray(:,:,:,4))
View the data function.
type ltvssDataFcn.mfunction [A,B,C,D,E,dx0,x0,u0,y0,Delays] = ltvssDataFcn(t) % SISO, first order A = -(1+0.5*sin(t)); B = 1; C = 1; D = 0; E = []; dx0 = []; x0 = []; u0 = []; y0 = 0.1*sin(5*t); Delays = [];
You can sample the dynamics of an LPV model over a point or a grid of (,) values to obtain affine dynamics for a given time or parameter value.
For this example, dataFcnMaglev.m defines the matrices and offsets of a magnetic levitation system. The magnetic levitation controls the height of a levitating ball using a coil current that creates a magnetic force on the ball.
Create an LPV model.
lpvSys = lpvss('h',@dataFcnMaglev)Continuous-time state-space LPV model with 1 outputs, 1 inputs, 2 states, and 1 parameters. Model Properties
Sample the LPV dynamics at three h values to obtain local LTI models.
hmin = 0.05; hmax = 0.25; hcd = linspace(hmin,hmax,3); ssArray = psample(lpvSys,[],hcd); size(ssArray)
1x3 array of state-space models. Each model has 1 outputs, 1 inputs, and 2 states.
The function stores the model offsets in the Offsets property of the array.
ssArray.Offsets
ans=1×3 struct array with fields:
dx
x
u
y
Plot the Bode response.
bodemag(ssArray)

View the data function.
type dataFcnMaglev.mfunction [A,B,C,D,E,dx0,x0,u0,y0,Delays] = dataFcnMaglev(~,p) % MAGLEV example: % x = [h ; dh/dt] % p=hbar (equilibrium height) mb = 0.02; % kg g = 9.81; alpha = 2.4832e-5; A = [0 1;2*g/p 0]; B = [0 ; -2*sqrt(g*alpha/mb)/p]; C = [1 0]; % h D = 0; E = []; dx0 = []; x0 = [p;0]; u0 = sqrt(mb*g/alpha)*p; % ibar y0 = p; % y = h = hbar + (h-hbar) Delays = [];
This example shows how to specify sampling grid values using a structure array.
For this example, lpvHCModel.m defines the following model.
.
Use lpvss to construct this LPV plant. Since is infinite for , clip to the range [–0.99,0.99] to stay away from the singularity.
pmax = 0.99; G = lpvss('p',@(t,p) lpvHCModel(t,p,pmax),'StateName','x')
Continuous-time state-space LPV model with 1 outputs, 1 inputs, 1 states, and 1 parameters. Model Properties
Specify a structure containing the sampling values.
pvals = linspace(-0.9,0.9,5);
S = struct('p',pvals)S = struct with fields:
p: [-0.9000 -0.4500 0 0.4500 0.9000]
Sample the model.
ssArr = psample(G,S); size(ssArr)
1x5 array of state-space models. Each model has 1 outputs, 1 inputs, and 1 states.
View the data function.
type lpvHCModel.mfunction [A,B,C,D,E,dx0,x0,u0,y0,Delays] = lpvHCModel(~,p,pmax) % Plant model p = max(-pmax,min(p,pmax)); tau = atanh(p); A = -1; B = 1; C = 1-p^2; D = 0; E = []; dx0 = []; x0 = tau; u0 = tau; y0 = p; Delays = [];
You can obtain the array of state-space models back from the gridded LTV or LPV model using the psample command.
For this example, load a gridded LPV model obtained from the batch linearization of a water-tank Simulink® model in the Create LPV Model from Batch Linearization Results example.
load watertankLPVModel.matObtain the array of local state-space models.
ssArray = psample(gLPV); size(ssArray)
7x1 array of state-space models. Each model has 1 outputs, 1 inputs, and 1 states.
For a gridded model, the psample command samples the model at the grid obtained from the Grid property of the model.
gLPV.Grid
ans = struct with fields:
H: [7×1 double]
Input Arguments
Output Arguments
Version History
Introduced in R2024aSee Also
lpvss | ltvss | ss | ssInterpolant