ssInterpolant
Syntax
Description
For a collection of local ss models sampled in time or parameter space,
ssInterpolant builds a linear time-varying (LTV) or linear
parameter-varying (LPV) model that interpolates local LTI behaviors into global LTV or LPV
behavior. You can also use ssInterpolant to turn analytic LTV or LPV
models into gridded LTV or LPV models, or to resample gridded LTV or LPV
models.
sys = ssInterpolant(ssArray)ssArray. For this array, the ssArray.SamplingGrid
property specified the underlying time or parameter grid, which can be rectangular or
consist of scattered samples, and ssArray.Offsets specifies the
linearization offsets. (since R2024a)
Examples
This example shows how to create an LPV model from an array of state space models and associated offsets obtained from batch linearization of a water-tank Simulink® model.
Open the Simulink model.
mdl = 'watertankNLModel';
open_system(mdl)Specify the initial condition for water height.
h0 = 10;
Specify model linear analysis points.
io(1) = linio('watertankNLModel/Step',1,'input'); io(2) = linio('watertankNLModel/H',1,'output');
Simulate the model and extract operating points at time snapshots.
tlin = [0 30 40 50 60 70 80]; op = findop(mdl,tlin);
Compute the linearizations along with offsets.
options = linearizeOptions('StoreOffsets',true);
[linsys,~,info] = linearize(mdl,io,op,options);Specify a grid of height values and construct the LPV model. For this model, height is the first state.
h = zeros(size(tlin)); for ct=1:numel(h) h(ct) = op(ct).States(1).x; end linsys.SamplingGrid.H = h; linsys.Offsets = info.Offsets;
gLPV = ssInterpolant(linsys,'spline')Continuous-time state-space LPV model with 1 outputs, 1 inputs, 1 states, and 1 parameters. Model Properties
Simulate the watertank model.
h0 = 15; sim(mdl); usim = getElement(logsOut,'V'); hsim = getElement(logsOut,'H');
Simulate the LPV model with the exact parameter trajectory.
t = linspace(0,150,200); p = @(t,x,u) x(1); u = interp1(usim.Values.Time,usim.Values.Data,t); ylpv = lsim(gLPV,u,t,h0,p);
Plot the results.
plot(hsim.Values.Time,hsim.Values.Data,t,ylpv,'--') legend('Simulink model','LPV model')

The LPV model provides a good approximation of the nonlinear model.
For this example, dataFcnMaglev.m defines the matrices and offsets of a magnetic levitation system. The magnetic levitation controls the height of a levitating ball using a coil current that creates a magnetic force on the ball.
Create an LPV model.
h0 = 1;
lpvSys = lpvss('h',@dataFcnMaglev,0,0,h0)Continuous-time state-space LPV model with 1 outputs, 1 inputs, 2 states, and 1 parameters. Model Properties
lpvSys.StateName = {'h','hdot'};
lpvSys.InputName = 'current';
lpvSys.InputName = 'height';Define parameter variation for height h.
hmin = 0.05; hmax = 0.25; hcd = linspace(hmin,hmax,5); SamplingGrid.h = hcd;
Convert to a gridded model.
glpvSys1 = ssInterpolant(lpvSys,SamplingGrid)
Continuous-time state-space LPV model with 1 outputs, 1 inputs, 2 states, and 1 parameters. Model Properties
This command is equivalent to constructing a gridded model from an array of local models sampled at the same parameter space.
ssArray = psample(lpvSys,SamplingGrid); glpvSys2 = ssInterpolant(ssArray);
For this example consider an array of state space models and associated offsets obtained from batch linearization of a water-tank Simulink® model in the Create LPV Model from Batch Linearization Results example.
The dynamics of this water-tank system are described by this equation.
Load the linearization results.
load watertankLinModel.matConstruct a gridded model with the spline interpolation method and clip extrapolation method.
glpv1 = ssInterpolant(linsys,info.Offsets,"spline","clip");
Construct a gridded model with the spline extrapolation.
glpv2 = ssInterpolant(linsys,info.Offsets,"spline","spline");
Compare simulation results of both gridded models when the initial height starts from a point outside the constructing grid. Set the height such that the tank is almost empty.
h0 = 0.4; sim("watertankNLModel.slx"); usim = getElement(logsOut,"V"); hsim = getElement(logsOut,"H");
Simulate the LPV models with the exact parameter trajectory.
t = linspace(0,150,200); p = @(t,x,u) x(1); u = interp1(usim.Values.Time,usim.Values.Data,t); ylpv1 = lsim(glpv1,u,t,h0,p); ylpv2 = lsim(glpv2,u,t,h0,p); plot(t,ylpv1,t,ylpv2,"--",hsim.Values.Time,hsim.Values.Data,".-") legend("clip extrapolation","spline extrapolation", ... "nonlinear simulation",Location="best")
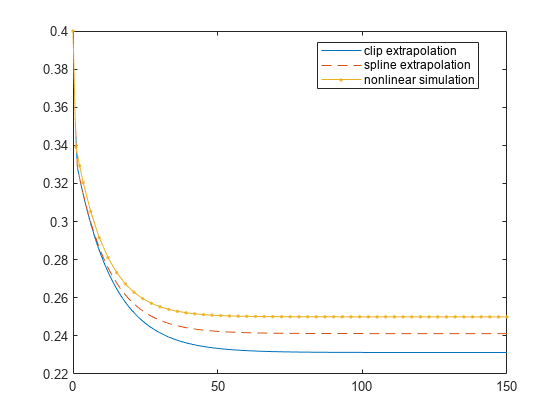
When the tank is almost empty, the spline method captures the rapid slope change resulting from the nonlinearity better than the clip method.
Input Arguments
Output Arguments
Limitations
Scattered interpolation (since R2023b) is supported only for parameter grids up to three dimensions.