initial
系统对状态空间模型的初始状态的响应
语法
说明
对于状态空间和稀疏状态空间模型,initial 计算系统对初始状态 xinit 的非强迫响应 y。
连续时间:
离散时间:
这是当 u(t) 保持在偏移值 u0 时的系统响应。
对于线性时变或线性参数变化状态空间模型,initial 计算具有初始状态 xinit、初始参数 pinit(LPV 模型)且输入保持为偏移值(u(t) = u0(t) 或 u(t) = u0(t,p))时的响应,这对应于局部线性动态特性的初始条件响应。
initial(___) 使用所有先前输入参量组合的默认绘图选项绘制 sys 的初始条件响应。如需更多绘图自定义选项,请使用 initialplot。
要在同一图上绘制多个动态系统的响应,您可以将
sys指定为以逗号分隔的模型列表。例如,initial(sys1,sys2,sys3)在同一图上绘制三个模型的响应。要为图中的每个系统分别指定一种颜色、线型和标记,请为每个系统指定
LineSpec值。例如,initial(sys1,LineSpec1,sys2,LineSpec2)绘制两个模型并指定它们的绘图样式。有关指定LineSpec值的详细信息,请参阅initialplot。
示例
对于此示例,生成一个具有 5 个状态的随机状态空间模型,并创建初始状态系统响应图。
rng("default")
sys = rss(5);
x0 = [1,2,3,4,5];
initial(sys,x0)
绘制以下状态空间模型的响应:
采用以下初始条件:
a = [-0.5572, -0.7814; 0.7814, 0]; c = [1.9691 6.4493]; x0 = [1 ; 0]; sys = ss(a,[],c,[]); initial(sys,x0)
假设有以下双输入、双输出动态系统。
将 sys 转换为状态空间形式,因为初始条件响应图仅支持状态空间模型。
sys = ss([0, tf([3 0],[1 1 10]) ; tf([1 1],[1 5]), tf(2,[1 6])]); size(sys)
State-space model with 2 outputs, 2 inputs, and 4 states.
得到的状态空间模型有四个状态。因此,提供一个具有四个元素的初始条件向量。
x0 = [0.3,0.25,1,4];
创建初始条件响应图。
initial(sys,x0);

得到的图包含两个子图 - sys 中的每个输出各对应一个子图。
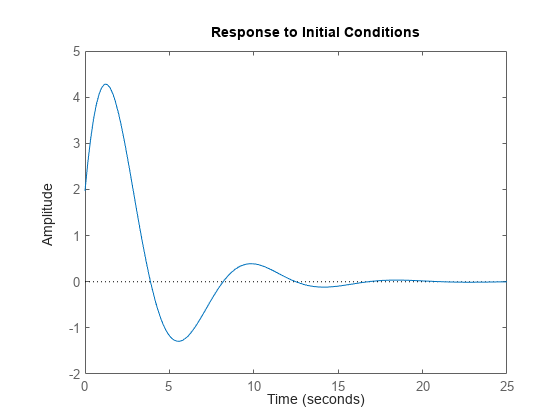
对于此示例,检查以下零极点增益模型的初始条件响应,并将绘图限制在 tFinal = 15 秒。
首先,将 zpk 模型转换为 ss 模型,因为 initial 仅支持状态空间模型。
sys = ss(zpk(-1,[-0.2+3j,-0.2-3j],1)*tf([1 1],[1 0.05])); tFinal = 15; x0 = [4,2,3];
现在,创建初始条件响应图。
initial(sys,x0,tFinal);
对于此示例,绘制三个动态系统的初始条件响应。
首先,创建这三个模型并提供初始条件。所有模型的状态数应相同。
rng('default');
sys1 = rss(4);
sys2 = rss(4);
sys3 = rss(4);
x0 = [1,1,1,1];使用跨度为 5 秒的时间向量 t 绘制这三个模型的初始条件响应。
t = 0:0.1:5; initial(sys1,'r--',sys2,'b',sys3,'g-.',x0,t)

提取以下具有两个状态的状态空间模型的初始条件响应数据:
使用以下初始条件:
a = [-0.5572, -0.7814; 0.7814, 0]; c = [1.9691 6.4493]; x0 = [1 ; 0]; sys = ss(a,[],c,[]); [y,tOut,x] = initial(sys,x0);
数组 y 的行数与时间采样数相同(tOut 的长度)相同,列数与输出数相同。类似地,x 的行数等于时间采样数(tOut 的长度),列数与输出数相同。
对于此示例,提取具有 6 个状态、3 个输出和 2 个输入的状态空间模型的初始条件响应数据。
首先,创建该模型并提供初始条件。
rng('default');
sys = rss(6,3,2);
x0 = [0.1,0.3,0.05,0.4,0.75,1];使用跨度为 15 秒的时间向量 t 提取该模型的初始条件响应。
t = 0:0.1:15; [y,tOut,x] = initial(sys,x0,t);
数组 y 的行数与时间采样数相同(tOut 的长度)相同,列数与输出数相同。类似地,x 的行数等于时间采样数(tOut 的长度),列数与输出数相同。
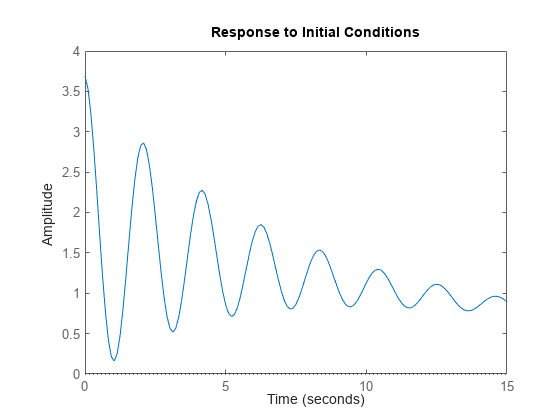
对于此示例,throttleLPV.m 定义了一个非线性发动机节气门的动态特性,该节气门在 15 度到 90 度的开度范围内呈线性行为。
使用 lpvss 创建此模型。此模型由节气门角度进行参数化,节气门角度是此模型的第一个状态。
c0 = 50;
k0 = 120;
K0 = 1e4;
b0 = 4e4;
yf = 15*K0/(k0+K0);
Ts = 0;
sys = lpvss("x1",@(t,p) throttleLPV(p,c0,k0,b0,K0),Ts,0,15);您可以沿轨迹 计算此模型的初始响应。
计算从线性范围的下限以较小的角速度开始条件下的响应。指定参数轨迹,并使用 findop 找到初始条件。
pFcn = @(t,x,u)x(1); xinit = [15;10]; pinit = xinit(1); t = linspace(0,0.6,500); ic = findop(sys,t(1),pinit,x=xinit); y = initial(sys,ic,t,pFcn); plot(t,y)

计算从线性范围的下限以足够大的角速度开始以达到该范围的上限条件下的响应。
xinit2 = [15;5e3]; pinit2 = xinit2(1); t2 = linspace(0,1,1000); ic2 = findop(sys,t2(1),pinit2,x=xinit2); y2 = initial(sys,ic2,t2,pFcn); plot(t2,y2)

查看数据函数。
type throttleLPV.mfunction [A,B,C,D,E,dx0,x0,u0,y0,Delays] = throttleLPV(x1,c,k,b,K) % LPV representation of engine throttle dynamics. % Ref: https://www.mathworks.com/help/sldo/ug/estimate-model-parameter-values-gui.html % x1: scheduling parameter (throttle angle; first state of the model) % c,k,b,K: physical parameters A = [0 1; -k -c]; B = [0; b]; C = [1 0]; D = 0; E = []; Delays = []; x0 = []; u0 = []; y0 = []; % Nonlinear displacement value NLx = max(90,x1(1))-90+min(x1(1),15)-15; % Capture the nonlinear contribution as a state-derivative offset dx0 = [0;-K*NLx];
创建一个具有复系数的状态空间模型。
A = [-2-2i -2;1 0]; B = [2;0]; C = [0 0.5+2.5i]; D = 0; sys = ss(A,B,C,D);
计算该系统对任意起始状态的初始条件响应。
ic = [1 2]; [y,t] = initial(sys,ic);
得到的响应数据包含复数输出值。
y
输入参数
输出参量
提示
当您需要额外的绘图自定义选项时,请改用
initialplot。使用
initial创建的绘图不支持以字符串数组或字符向量元胞数组形式指定的多行标题或标签。要指定多行标题和标签,请使用包含newline字符的单个字符串。initial(sys) title("first line" + newline + "second line");
版本历史记录
在 R2006a 之前推出另请参阅
initialplot | impulse | lsim | 线性系统分析器 | step