translatecov
Translate parameter covariance across model transformation operations
Description
newSys = translatecov(fcn,sys)sys into sysNew = fcn(sys) and translates
the parameter covariance of sys to the parameter covariance of the
transformed model. fcn is a transformation function that you specify.
The command computes the parameter covariance of sys using the Gauss
Approximation formula. For more information, see Algorithms.
Applying model transformations directly does not always translate the parameter
covariance of the original model to that of the transformed model. For example,
d2c(sys) does not translate the parameter covariance of
sys. In contrast, translatecov(@(x)d2c(x),sys)
produces a transformed model that has the same coefficients as d2c(sys)
and has the translated parameter covariance of sys.
newSys = translatecov(fcn,Input1,...,InputN)sys_new = fcn(Input1,...,InputN) and its parameter
covariance. At least one of the N inputs must be a linear model with
parameter covariance information.
Examples
Convert an estimated transfer function model into state-space model while also translating the estimated parameter covariance.
Estimate a transfer function model.
load iddata1
sys1 = tfest(z1,2);Convert the estimated model to state-space form while also translating the estimated parameter covariance.
sys2 = translatecov(@(x)idss(x),sys1);
If you convert the transfer function model to state-space form directly, the estimated parameter covariance is lost (the output of getcov is empty).
sys3 = idss(sys1); getcov(sys3)
ans =
[]
View the parameter covariance in the estimated and converted models.
covsys1 = getcov(sys1); covsys2 = getcov(sys2);
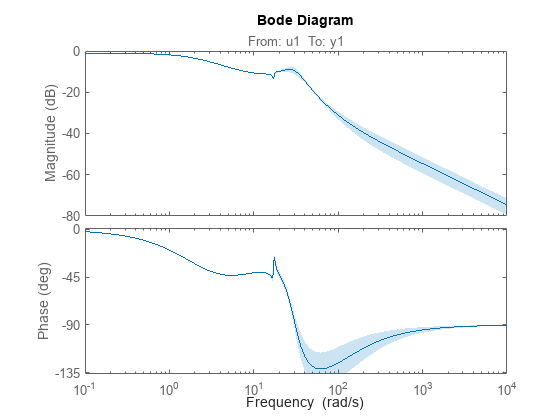
Compare the confidence regions.
h = bodeplot(sys1,sys2); showConfidence(h,2);
The confidence bounds for sys1 overlaps with sys2.
Concatenate 3 single-output models such that the covariance data from the 3 models combine to produce the covariance data for the resulting model.
Construct a state-space model.
a = [-1.1008 0.3733;0.3733 -0.9561];
b = [0.7254 0.7147;-0.0631 -0.2050];
c = [-0.1241 0; 1.4897 0.6715; 1.4090 -1.2075];
d = [0 1.0347; 1.6302 0; 0.4889 0];
sys = idss(a,b,c,d,'Ts',0);Generate multi-output estimation data.
t = (0:0.01:0.99)';
u = randn(100,2);
y = lsim(sys,u,t,'zoh');
y = y + rand(size(y))/10;
data = iddata(y,u,0.01); Estimate a separate model for each output signal.
m1 = ssest(data(:,1,:),2,'feedthrough',true(1,2), 'DisturbanceModel', 'none'); m2 = ssest(data(:,2,:),2,'feedthrough',true(1,2), 'DisturbanceModel', 'none'); m3 = ssest(data(:,3,:),2,'feedthrough',true(1,2), 'DisturbanceModel', 'none');
Combine the estimated models while also translating the covariance information.
f = @(x,y,z)[x;y;z]; M2 = translatecov(f, m1, m2, m3);
The parameter covariance is not empty.
getcov(M2, 'factors')ans = struct with fields:
R: [36×36 double]
T: [24×36 double]
Free: [90×1 logical]
If you combine the estimated models into one 3-output model directly, the covariance information is lost (the output of getcov is empty).
M1 = [m1;m2;m3]; getcov(M1)
ans =
[]
Compare the confidence bounds.
h = bodeplot(M2, m1, m2, m3); showConfidence(h);
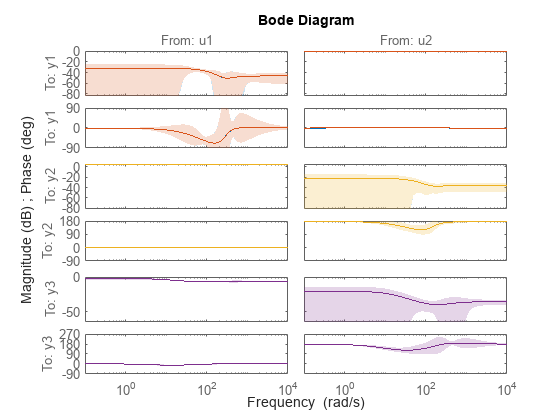
The confidence bounds for M2 overlap with those of m1, m2 and m3 models on their respective plot axes.
Consider a closed-loop feedback model consisting of a plant and controller. Translate the parameter covariance of the plant to the closed-loop feedback model.
Estimate a plant as a fourth-order state-space model using estimation data z1.
load iddata1 z1 Plant = ssest(z1,4);
Plant contains parameter covariance information.
Create a controller as a continuous-time zero-pole-gain model with zeros, poles, and gain equal to -2, -10, 5, respectively.
Controller = zpk(-2,-10,5);
Define a transformation function to generate the closed-loop feedback state-space model.
fcn = @(x,y)idss(feedback(x,y));
Translate the parameter covariance of the plant to the closed-loop feedback model.
sys_new = translatecov(fcn,Plant,Controller);
sys_new contains the translated parameter covariance information.
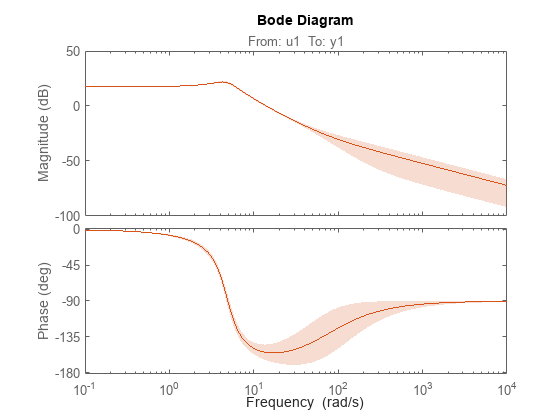
Plot the frequency-response of the transformed model sys_new, and view the confidence region of the response.
h = bodeplot(sys_new); showConfidence(h);
The plot shows the effect of the uncertainty in Plant on the closed-loop response.
Input Arguments
Output Arguments
Tips
If you obtained
systhrough estimation and have access to the estimation data, you can use zero-iteration update to recompute the parameter covariance. For example:load iddata1 m = ssest(z1,4); opt = ssestOptions opt.SearchOptions.MaxIterations = 0; m_new = ssest(z1,m2,opt)You cannot run a zero-iteration update for some model and data type combinations, such as a continuous-time
idpolymodel using time-domain data.Also, you cannot run a zero-iteration update if the
MaxIterationsoption, which depends on theSearchMethodoption, is not available.
Algorithms
translatecov uses numerical perturbations of individual parameters of
sys to compute the Jacobian of fcn(sys) parameters
with respect to parameters of sys. translatecov then
applies Gauss Approximation formula to translate the covariance, where J is the Jacobian
matrix. This operation can be slow for models containing a large number of free
parameters.
Version History
Introduced in R2012b