自主导航
使用自主导航应用扩展深度学习工作流
通过将 Deep Learning Toolbox™ 与 Navigation Toolbox™ 结合使用,将深度学习应用于自主导航应用。
精选示例
Train Deep Learning-Based Sampler for Motion Planning
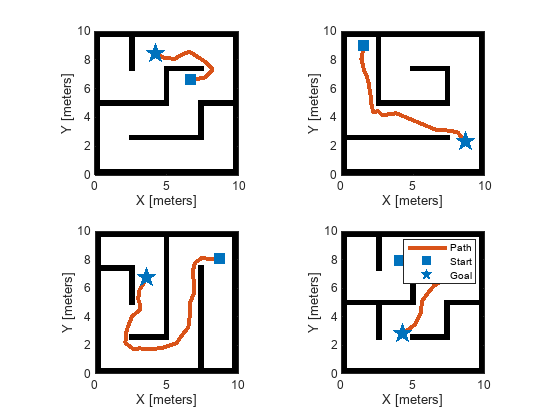
Create a deep learning-based sampler using Motion Planning Networks to speed up path planning using sampling-based planners like RRT (rapidly-exploring random tree) and RRT*. For information about Motion Planning Networks (MPNet) for state space sampling, see Get Started with Motion Planning Networks (Navigation Toolbox).

Accelerate Motion Planning with Deep-Learning-Based Sampler
The example shows how to use sampling-based planners such as RRT (rapidly-exploring random tree) and RRT* with Motion Planning Networks (MPNet), deep-learning-based sampler to find optimal paths efficiently.