Cuboid To 3D Simulation
Convert actor from cuboid coordinates to 3D simulation coordinates
Libraries:
Automated Driving Toolbox /
Driving Scenario and Sensor Modeling
Description
The Cuboid To 3D Simulation block converts a cuboid actor pose in world coordinates to the X, Y, and Yaw coordinates used by the Simulation 3D Vehicle with Ground Following block. Use the converted values to set vehicle positions within the 3D simulation environment for actors created using the Driving Scenario Designer app. The ground terrain of the scene determines the roll (x-axis rotation), pitch (y-axis rotation), and elevation (z-axis position) of the vehicle.
You can specify a bus containing a single actor pose or multiple actor poses. By default,
the block converts the pose of the first actor in the bus. To specify the actor whose pose you
want to convert, specify the ActorID of that actor.
In cuboid and 3D simulation driving scenarios, the coordinate systems are the same, but the origins of vehicles differ. In cuboid driving scenarios, the vehicle origin is on the ground, under the center of the rear axle. The block transforms this origin to the origin used in the 3D simulation environment, which is under the geometric center of the vehicle. The table shows the origin difference between the two environments. You must read the cuboid driving scenario using the Scenario Reader block.
| Cuboid Vehicle Origin | 3D Simulation Vehicle Origin |
|---|---|
|
|

Examples
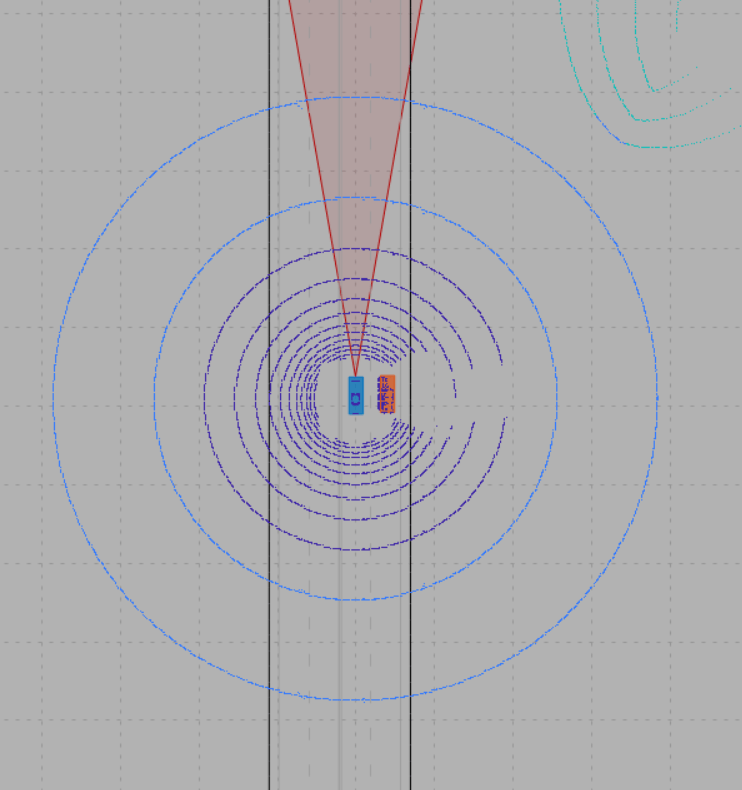
Visualize Sensor Data from Unreal Engine Simulation Environment
Visualize sensor coverage areas and detections obtained from high-fidelity radar and lidar sensors in the Unreal Engine® simulation environment.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2020a