Simulation 3D Probabilistic Radar Configuration
Configure probabilistic radar signatures in 3D simulation environment
Libraries:
Automated Driving Toolbox /
Simulation 3D
Description
Note
Simulating models with the Simulation 3D Probabilistic Radar Configuration block requires Simulink® 3D Animation™.
The Simulation 3D Probabilistic Radar Configuration block configures the probabilistic radar signatures for actors in a 3D simulation environment. This environment is rendered using the Unreal Engine® from Epic Games®. To model the probabilistic radars, use Simulation 3D Probabilistic Radar blocks. The configured radar signatures apply to all Simulation 3D Probabilistic Radar blocks in your model.
Examples
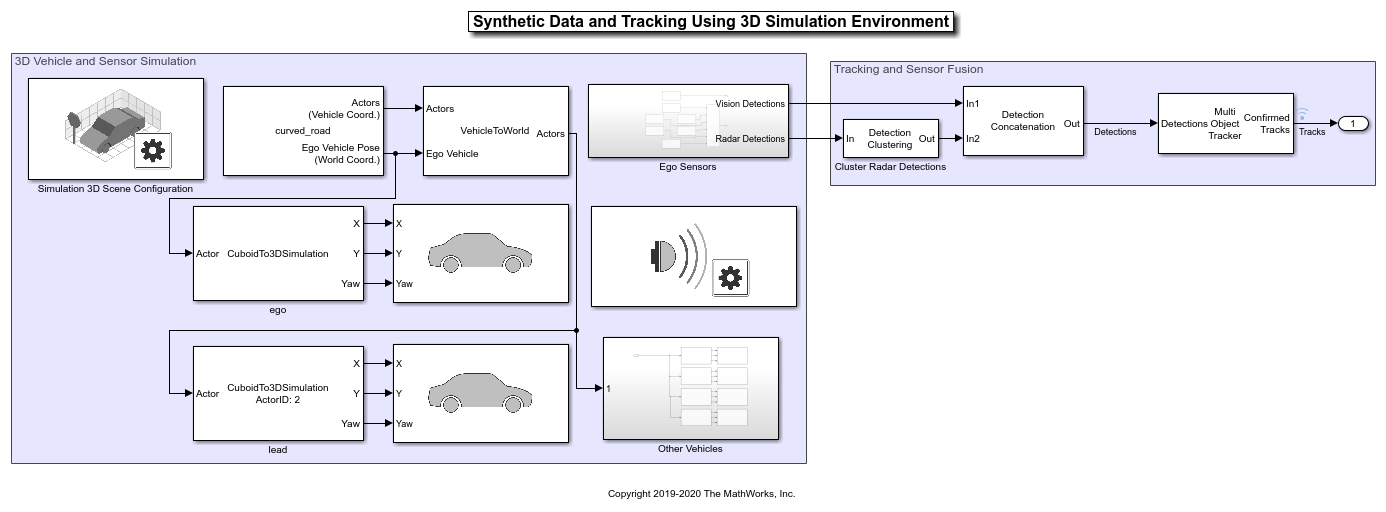
Simulate Vision and Radar Sensors in Unreal Engine Environment
Implement a synthetic data simulation for tracking and sensor fusion using Simulink and the Unreal Engine simulation environment.