Writer
Libraries:
Automated Driving Toolbox Interface for Eclipse SUMO Traffic Simulator
Description
Add-On Required: This feature requires the Automated Driving Toolbox Interface for Eclipse SUMO Traffic Simulator add-on.
The Writer block writes vehicle or visualization information to a SUMO™ scenario. Use the Topic Category parameter to select which data to write to the scenario.
You can set the Topic Category parameter to
Vehicle or Visualization. For example,
when you select the Vehicle topic, the block writes data associated
with the vehicle, such as the actor ID, velocity, and angular velocity, to the SUMO scenario.
Examples
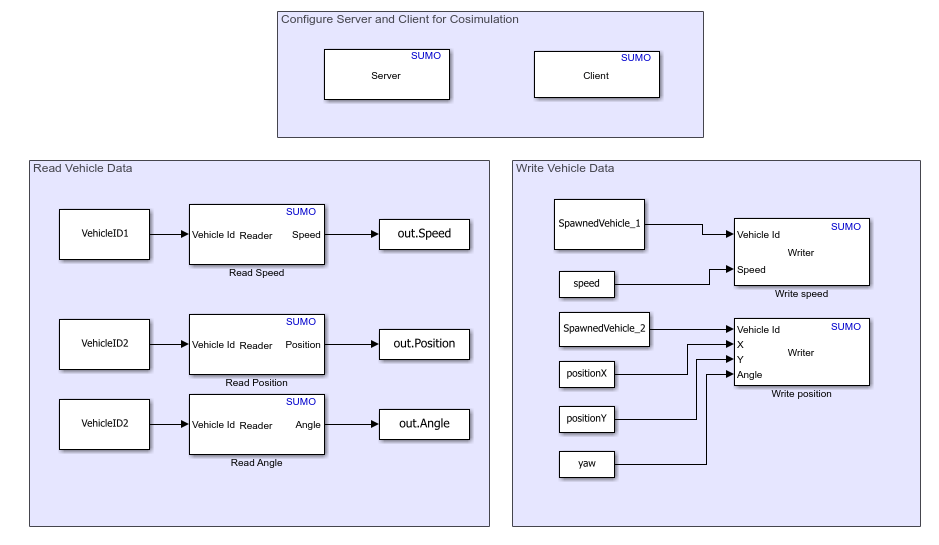
Read and Write Vehicle Data in SUMO Scenario Using Cosimulation with Simulink
Read and write vehicle data in Eclipse™ SUMO scenario.
Ports
Input
Parameters
Version History
Introduced in R2026a