ZalaZONE Automotive Proving Ground Smart City
Smart city 3D environment
Since R2024b
Description
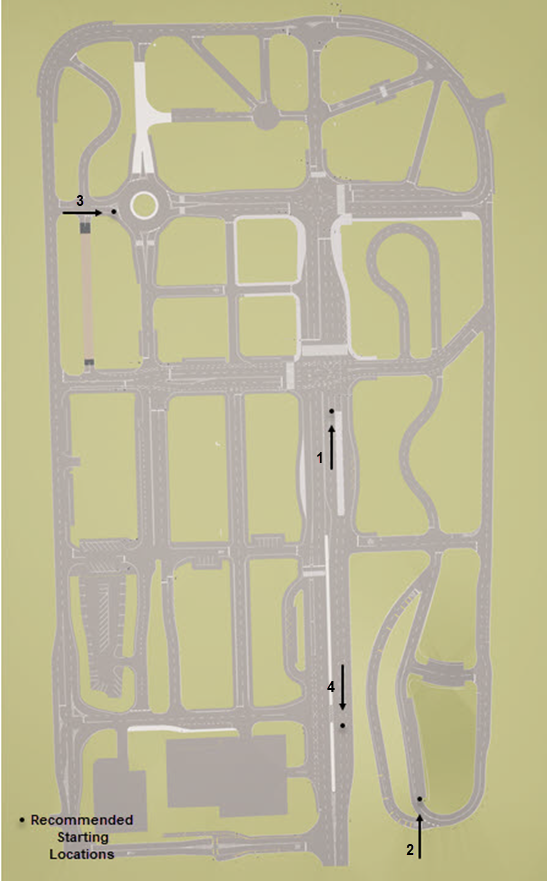
The ZalaZONE Automotive Proving Ground Smart City scene is a 3D environment of a smart city with these five urban testing environments:
Low-speed parking zone with a logistics yard for commercial vehicles
Downtown area
High-speed urban multi-lane area
Special T-intersections zone
Hill section with 10% and 20% gradients
The largest city block size is 25 by 60 meters, and the complete smart city area is 150,000 square meters. Lanes range from 2.75 to 3.5 meters wide at lengths of 25 to 50 meters. This scene is intended for simulation of numerous traffic, technical (NCAP/V2X), and dynamic test scenarios reaching a top speed of 70 km/h.

Setup
To simulate a driving algorithm in this scene:
Add a Simulation 3D Scene Configuration block to your Simulink® model.
In this block, set the Scene source parameter to
Default Scenes.View the currently available scenes in the Scene name parameter. If the scene is not available, you must install it.
To install the scene:
Click Install.
In the Add-on installer dialog box, select the scene.
Click Next and follow the prompts.
MATLAB® restarts after the scene is installed.
Select the scene name from the Scene name parameter.
Layout
| Overall | Active Area |
|---|---|
|
|
|
Objects

| Objects | X (m) | Y (m) | Z (m) | Rotation (deg) |
|---|---|---|---|---|
| Stop Signs | 724.400 | 1951.138 | 248.221 | 30 |
924.719 | 1937.025 | 248.882 | -80 | |
866.777 | 1925.778 | 249.321 | 90 | |
809.891 | 1661.974 | 246.341 | -90 | |
886.007 | 1675.197 | 246.747 | 90 | |
922.443 | 1640.317 | 247.824 | -30 | |
919.801 | 1603.549 | 251.581 | 70 | |
955.750 | 1585.526 | 245.138 | -90 | |
923.808 | 1501.435 | 246.436 | -120 | |
855.734 | 1489.214 | 244.973 | -90 | |
808.201 | 1818.976 | 247.843 | 90 | |
854.362 | 1563.076 | 245.812 | -90 |

| Objects | X (m) | Y (m) | Z (m) | Rotation (deg) |
|---|---|---|---|---|
| Yield Signs | 708.901 | 1576.484 | 244.695 | -180 |
713.159 | 1505.273 | 243.876 | -90 | |
714.201 | 1868.367 | 247.307 | 90 | |
715.868 | 1771.375 | 246.391 | 90 | |
720.896 | 1667.991 | 245.340 | 90 | |
723.066 | 1868.957 | 247.426 | -180 | |
725.127 | 1570.656 | 244.514 | 90 | |
726.948 | 1768.974 | 246.406 | -180 | |
731.234 | 1497.975 | 243.719 | 90 | |
732.963 | 1857.534 | 247.426 | 0 | |
749.002 | 1855.787 | 247.890 | -120 | |
751.982 | 1574.222 | 244.816 | -180 | |
753.162 | 1560.890 | 244.616 | 0 | |
753.372 | 1878.024 | 248.010 | 150 | |
754.979 | 1597.769 | 245.026 | -90 | |
760.420 | 1672.433 | 245.892 | -180 | |
760.752 | 1777.107 | 246.854 | -180 | |
766.595 | 1573.613 | 244.880 | -180 | |
767.190 | 1957.314 | 248.700 | 0 | |
771.301 | 1918.854 | 248.186 | 90 | |
771.908 | 1851.829 | 247.920 | -30 | |
774.842 | 1749.556 | 246.727 | 0 | |
775.984 | 1873.169 | 247.995 | 90 | |
797.967 | 1960.870 | 249.082 | 0 | |
802.665 | 1969.592 | 249.172 | 90 | |
812.719 | 1575.568 | 245.370 | -180 | |
814.416 | 1855.488 | 248.213 | 0 | |
819.010 | 1756.562 | 247.315 | 0 | |
820.513 | 1757.610 | 247.444 | -90 | |
823.302 | 1920.221 | 248.742 | -140 | |
825.070 | 1912.748 | 248.846 | 90 | |
825.585 | 1562.435 | 245.313 | 0 | |
828.436 | 1926.828 | 248.837 | -180 | |
836.158 | 1960.757 | 249.447 | 0 | |
836.539 | 1873.916 | 248.579 | 90 | |
839.672 | 1921.555 | 1921.555 | 90 | |
847.819 | 1813.898 | 1813.898 | -180 | |
850.605 | 1662.491 | 246.750 | -90 | |
850.844 | 1590.318 | 246.096 | -180 | |
855.583 | 1911.414 | 249.090 | -90 | |
857.256 | 1531.661 | 245.382 | -90 | |
857.308 | 1887.832 | 248.937 | -180 | |
865.548 | 1954.262 | 249.706 | 0 | |
870.918 | 1848.617 | 248.692 | 0 | |
879.329 | 1813.069 | 248.356 | 0 | |
885.489 | 1777.424 | 247.735 | 90 | |
896.086 | 1538.119 | 248.953 | -180 | |
899.307 | 1598.201 | 249.450 | 0 | |
910.010 | 1781.448 | 247.460 | -180 | |
911.922 | 1880.985 | 248.399 | -180 | |
927.140 | 1678.173 | 246.161 | -180 | |
928.843 | 1782.606 | 247.327 | -180 | |
936.514 | 1766.982 | 247.302 | 0 | |
938.443 | 1664.119 | 246.126 | 0 | |
957.010 | 1662.428 | 245.896 | -90 | |
957.645 | 1930.297 | 248.315 | 90 | |
957.645 | 1790.962 | 247.177 | -50 | |
966.117 | 1868.840 | 247.822 | 0 | |
843.426 | 1758.425 | 247.682 | -90 |
Tips
If you have the Automated Driving Toolbox™ Interface for Unreal Engine® Projects support package, then you can modify this scene. Enable the
MathWorksAutomotiveContentplugin to use the scene in Unreal Engine projects. The scene name in the plugin isZalaZONESmartCity.For more details on customizing scenes, see Customize Unreal Engine Scenes for Automated Driving.
References
[1] Szalay, Zsolt. "Critical Scenario Identification Concept: The Role of the Scenario-in-the-Loop Approach in Future Automotive Testing." IEEE Access 11 (July 2023): 82464–76. https://doi.org/10.1109/ACCESS.2023.3298875.
[2] Duleba, Szabolcs, Tamás Tettamanti, Ádám Nyerges, and Zsolt Szalay. “Ranking the Key Areas for Autonomous Proving Ground Development Using Pareto Analytic Hierarchy Process." IEEE Access 9 (March 2021): 51214–30. https://doi.org/10.1109/ACCESS.2021.3064448.
[3] Somogyi, Árpád, Tamás Tettamanti, Pál Varga, Zsolt Szalay, Dániel Baranyai, and Tamás Lovas. "Digital Map Generation Workflow Demonstrated on ZalaZONE Automotive Proving Ground Elements." NOMS 2023-2023 IEEE/IFIP Network Operations and Management Symposium, Miami, FL, May 8-12, 2023: 1–6. https://doi.org/10.1109/NOMS56928.2023.10154403.
[4] Szalay, Zsolt. “Next Generation X-in-the-Loop Validation Methodology for Automated Vehicle Systems.” IEEE Access 9 (2021): 35616–32. https://doi.org/10.1109/ACCESS.2021.3061732.
[5] József Somogyi, Árpád, Dániel Baranyai, Mohammad Dowajy, Tamás Lovas, Zsolt Szalay, and Tamás Tettamanti. “Artificial Intelligence Based High Definition Map Generation From Mobile Mapping Data.” IEEE Access 13 (2025): 121838–48. https://doi.org/10.1109/ACCESS.2025.3587592.
Version History
Introduced in R2024b