mfilt.cicinterp
(Removed) Fixed-point CIC interpolator
mfilt.cicinterp has been
removed. Use dsp.CICInterpolator instead. For more
details, see Version History.
Syntax
hm = mfilt.cicinterp(R,M,N,ILW,OWL,WLPS)
hm = mfilt.cicinterp
hm = mfilt.cicinterp(R,...)
Description
hm = mfilt.cicinterp(R,M,N,ILW,OWL,WLPS)
constructs a cascaded integrator-comb (CIC)
interpolation filter object that uses fixed-point
arithmetic.
All of the input arguments are optional. To enter any optional value, you must include all optional values to the left of your desired value.
When you omit one or more input options, the omitted option applies the default values shown in the table below.
The following table describes the input arguments
for creating hm.
Input Arguments | Description |
|---|---|
| Interpolation factor applied to the
input signal. Sharpens the response curve to let
you change the shape of the response.
|
| Differential delay. Changes the
shape, number, and location of nulls in the filter
response. Increasing |
| Number of sections. Deepens the nulls in the response curve. Note that this is the number of either comb or integrator sections, not the total section count. By default, the filter has two sections. |
| Word length of the input signal. Use any integer number of bits. The default value is 16 bits. |
| Word length of the output signal. It
can be any positive integer number of bits. By
default, |
| Defines the number of bits per word
in each filter section while accumulating the data
in the integrator sections or while subtracting
the data during the comb sections (using 'wrap'
arithmetic). Enter When you elect to specify
|
hm = mfilt.cicinterp
constructs the CIC interpolator using the default
values for the optional input arguments.
hm = mfilt.cicinterp(R,...)
constructs the CIC interpolator applying the
values you provide for R and
any other values you specify as input
arguments.
Constraints and Conversions
In Hogenauer [1], the author describes the constraints
on CIC interpolator filters.
mfilt.cicinterp enforces a
constraint—the word lengths of the filter
sections must be non-decreasing. That is, the word
length of each filter section must be the same
size as, or greater than, the word length of the
previous filter section.
The formula for Wj, the minimum register width, is derived in [1]. The formula for Wj is given by
where Gj, the maximum register growth up to the jth section, is given by
When the differential delay, M, is 1, there is also a special condition for the register width of the last comb, WN, that is given by
The conversions denoted by the cast blocks
in the integrator diagrams in Algorithms
perform the changes between the word lengths of
each section. When you specify word lengths that
do not follow the constraints described in this
section, mfilt.cicinterp
returns an error.
The fraction lengths and scalings of the filter sections do not change. At each section the word length is either staying the same or increasing. The signal scaling can change at the output after the final filter section if you choose the output word length to be less than the word length of the final filter section.
Properties of the Object
The following table lists the properties for the filter with a description of each.
Name | Values | Default | Description |
|---|---|---|---|
|
|
| Reports the kind of arithmetic the filter uses. CIC interpolators are always fixed-point filters. |
| Any positive integer | 2 | Amount to increase the input sampling rate. |
| Any positive integer | 1 | Sets the differential delay for the filter. Usually a value of one or two is appropriate. |
|
| None | Reports the type of filter object,
such as an interpolator or fractional integrator.
You cannot set this property — it is always
read only and results from your choice of
|
|
|
| Set the usage mode for the filter. Refer to Usage Modes below for details. |
| Any positive integer | 16 | The number of bits applied as the fraction length to interpret the input data to the filter. |
| Any positive integer | 16 | The number of bits applied to the word length to interpret the input data to the filter. |
| Any positive integer | 2 | Number of sections used in the
interpolator. Generally called
|
| Any positive integer | 15 | The number of bits applied to the fraction length to interpret the output data from the filter. Read-only. |
| Any positive integer | 16 | The number of bits applied to the word length to interpret the output data from the filter. |
|
|
| Determines whether the filter states
get restored to their starting values for each
filtering operation. The starting values are the
values in place when you create the filter if you
have not changed the filter since you constructed
it. |
| Any integer or a vector of length 2N, where N is a positive integer. This property only applies
when the | 16 | Defines the bits per section used
while accumulating the data in the integrator
sections or while subtracting the data during the
comb sections (using 'wrap' arithmetic). Enter
|
|
|
| Stored conditions for the filter,
including values for the integrator and comb
sections before and after filtering.
|
Usage Modes
There are usage modes which are set using
the FilterInternals
property:
FullPrecision— In this mode, the word and fraction lengths of the filter sections and outputs are automatically selected for you. The output and last section word lengths are set to:where R is the interpolation factor, M is the differential delay, N is the number of filter sections, and I denotes the input word length.
MinWordLengths— In this mode, you specify the word length of the filter output in theOutputWordLengthproperty. The word lengths of the filter sections are automatically set in the same way as in theFullPrecisionmode. The section fraction lengths are set to the input fraction length. The output fraction length is set to the input fraction length minus the difference between the last section and output word lengths.SpecifyWordLengths— In this mode, you specify the word lengths of the filter sections and output in theSectionWordLengthsandOutputWordLengthproperties. The fraction lengths of the filter sections are set such that the spread between word length and fraction length is the same as in full-precision mode. The output fraction length is set to the input fraction length minus the difference between the last section and output word lengths.SpecifyPrecision— In this mode, you specify the word and fraction lengths of the filter sections and output in theSectionWordLengths,SectionFracLengths,OutputWordLength, andOutputFracLengthproperties.
About the States of the Filter
In the states property
you find the states for both the integrator and
comb portions of the filter.
states is a matrix of
dimensions
m+1-by-n,
with the states apportioned as follows:
States for the integrator portion of the filter are stored in the first row of the state matrix.
States for the comb portion fill the remaining rows in the state matrix.
To review the states of a CIC filter, use
the int method
to assign the states. As an example, here are the
states for a CIC interpolator
hm before and after filtering
data:
x = fi(cos(pi/4*[0:99]),true,16,0); % Fixed-point input data hm = mfilt.cicinterp(2,1,2,16,16,16); % get initial states-all zero sts=int(hm.states) set(hm,'InputFracLength',0); % Integer input specified y=filter(hm,x); sts=int(hm.states) %sts = % % -1 -1 % -1 -1
Design Considerations
When you design your CIC interpolation filter, remember the following general points:
The filter output spectrum has nulls at ω = k * 2π/
rmradians, k = 1,2,3....Aliasing and imaging occur in the vicinity of the nulls.
n, the number of sections in the filter, determines the passband attenuation. Increasingnimproves the filter ability to reject aliasing and imaging, but it also increases the droop or rolloff in the filter passband. Using an appropriate FIR filter in series after the CIC interpolation filter can help you compensate for the induced droop.The DC gain for the filter is a function of the interpolation factor. Raising the interpolation factor increases the DC gain.
Examples
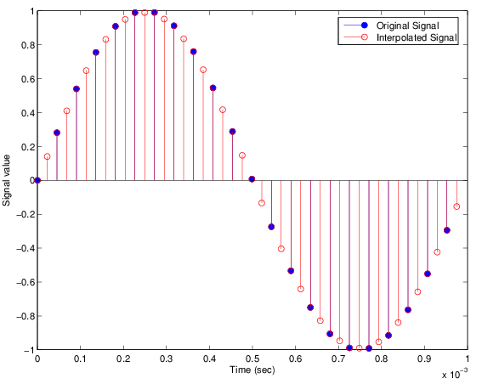
Demonstrate interpolation by a factor of two, in
this case from 22.05 kHz to 44.1 kHz. Note the
scaling required to see the results in the stem
plot and to use the full range of the
int16 data type.
R = 2; % Interpolation factor.
hm = mfilt.cicinterp(R); % Use default NumberOfSections and
% DifferentialDelay property values.
fs = 22.05e3; % Original sample frequency:22.05 kHz.
n = 0:5119; % 5120 samples, .232 second long signal.
x = sin(2*pi*1e3/fs*n); % Original signal, sinusoid at 1 kHz.
y_fi = filter(hm,x); % 5120 samples, still 0.232 seconds.
% Scale the output to overlay stem plots correctly.
x = double(x);
y = double(y_fi);
y = y/max(abs(y));
stem(n(1:22)/fs,x(1:22),'filled'); % Plot original signal sampled
% at 22.05 kHz.
hold on;
stem(n(1:44)/(fs*R),y(4:47),'r'); % Plot interpolated signal
% (44.1 kHz) in red.
xlabel('Time (sec)');ylabel('Signal Value');As you expect, the plot shows that the interpolated signal matches the input sine shape, with additional samples between each original sample.
Use the filter visualization tool (FVTool) to plot the response of the interpolator object. For example, to plot the response of an interpolator with an interpolation factor of 7, 4 sections, and 1 differential delay, do something like the following:
hm = mfilt.cicinterp(7,1,4) fvtool(hm)
Algorithms
To show how the CIC interpolation filter is
constructed, the following figure presents a block
diagram of the filter structure for a two-section
CIC interpolation filter (n =
2). fs is the high sampling
rate, the output from the interpolation
process.
For details about the bits that are removed in the integrator section, refer to [1] in References.

When you select MinWordLengths,
the filter section word lengths are automatically
set to the minimum number of bits possible in a
valid CIC interpolator.
mfilt.cicinterp computes the
wordlength for each section so the roundoff noise
introduced by all sections is less than the
roundoff noise introduced by the quantization at
the output.
References
[1] Hogenauer, E. B., “An Economical Class of Digital Filters for Decimation and Interpolation,” IEEE® Transactions on Acoustics, Speech, and Signal Processing, ASSP-29(2): pp. 155-162, 1981
[2] Meyer-Baese, Uwe, “Hogenauer CIC Filters,” in Digital Signal Processing with Field Programmable Gate Arrays, Springer, 2001, pp. 155-172
[3] Harris, Fredric J., Multirate Signal Processing for Communication Systems, Prentice-Hall PTR, 2004 , pp. 343