mfilt.firtdecim
Direct-form transposed FIR filter
mfilt.firtdecim has been removed. Use dsp.FIRDecimator instead.
Syntax
hm = mfilt.firtdecim(m)
hm = mfilt.firtdecim(m,num)
Description
hm = mfilt.firtdecim(m) returns a polyphase
decimator mfilt object hm based on
a direct-form transposed FIR structure with a decimation factor of
m. A lowpass Nyquist filter of gain 1 and cutoff frequency of
π/m is the default.
hm = mfilt.firtdecim(m,num) uses the
coefficients specified by num for the decimation filter.
num is a vector containing the coefficients of the transposed FIR
lowpass filter used for decimation. If omitted, a lowpass Nyquist filter with gain of 1
and cutoff frequency of π/m is the default.
Make this filter a fixed-point or single-precision filter by changing the value of the
Arithmetic property for the filter hm as
follows:
To change to single-precision filtering, enter
set(hm,'arithmetic','single');
To change to fixed-point filtering, enter
set(hm,'arithmetic','fixed');
Input Arguments
The following table describes the input arguments for creating
hm.
Input Argument | Description |
|---|---|
| Vector containing the coefficients of the FIR lowpass
filter used for interpolation. When |
| Decimation factor for the filter. |
Object Properties
This section describes the properties for both floating-point filters (double-precision and single-precision) and fixed-point filters.
Floating-Point Filter Properties
Every multirate filter object has properties that govern the way it behaves when
you use it. Note that many of the properties are also input arguments for creating
mfilt.firtdecim objects. The next table describes each
property for an mfilt.firtdecim filter object.
Name | Values | Description |
|---|---|---|
|
| Specifies the arithmetic the filter uses to process data while filtering. |
| Integer | Decimation factor for the filter. |
| Character vector | Reports the type of filter object. You cannot set this
property — it is always read only and results from your
choice of |
| Integers | Contains a value derived from the number of input samples
and the decimation factor — |
| Vector | Vector containing the coefficients of the FIR lowpass filter used for decimation. |
|
| Determines whether the filter states get restored to zeros
for each filtering operation. The starting values are the values
in place when you create the filter if you have not changed the
filter since you constructed it.
|
| Double, single [ | The idea behind having both
|
|
| Contains the filter states before, during, and after filter operations. States act as filter memory between filtering runs or sessions. |
Fixed-Point Filter Properties
This table shows the properties associated with the fixed-point implementation of
the mfilt.firtdecim filter.
Note
The table lists all of the properties that a fixed-point filter can have. Many of the properties listed are dynamic, meaning they exist only in response to the settings of other properties. To view all of the characteristics for a filter at any time, use
info(hm)
where hm is a filter.
For further information about the properties of this filter or any
mfilt object, refer to Multirate Filter Properties.
Name | Values | Description |
|---|---|---|
| Any positive or negative integer number of bits. [32] | Specifies the fraction length used to interpret data output
by the accumulator. This is a property of FIR filters and
lattice filters. IIR filters have two similar properties
— |
| Any integer number of bits [39] | Sets the word length used to store data in the accumulator. |
| fixed for fixed-point filters | Setting this to |
| [true], false | Specifies whether the filter automatically chooses the
proper fraction length to represent filter coefficients without
overflowing. Turning this off by setting the value to
|
| Any integer number of bits [16] | Specifies the word length to apply to filter coefficients. |
| [FullPrecision], SpecifyPrecision | Controls whether the filter automatically sets the output
word and fraction lengths, product word and fraction lengths,
and the accumulator word and fraction lengths to maintain the
best precision results during filtering. The default value,
|
| Any positive or negative integer number of bits [15] | Specifies the fraction length the filter uses to interpret input data. |
| Any integer number of bits [16] | Specifies the word length applied to interpret input data. |
| Any positive or negative integer number of bits
[ | Sets the fraction length used to interpret the numerator coefficients. |
| Any positive or negative integer number of bits [32] | Determines how the filter interprets the filter output
data. You can change the value of
|
| Any integer number of bits [39] | Determines the word length used for the output data. You
make this property editable by setting
|
| saturate, [wrap] | Sets the mode used to respond to overflow conditions in
fixed-point arithmetic. Choose from either
|
|
| Differentiates between the adders in the filter that work
in full precision at all times
( |
| [ | Sets the mode the filter uses to quantize numeric values when the values lie between representable values for the data format (word and fraction lengths).
The choice you make affects only the accumulator and output arithmetic. Coefficient and input arithmetic always round. Finally, products never overflow — they maintain full precision. |
| [true], false | Specifies whether the filter uses signed or unsigned fixed-point coefficients. Only coefficients reflect this property setting. |
|
| Contains the filter states before, during, and after filter
operations. States act as filter memory between filtering runs
or sessions. The states use |
Filter Structure
To provide sample rate changes, mfilt.firtdecim uses the following
structure. At the input you see a commutator that operates counterclockwise, moving from
position 0 to position 2, position 1, and back to position 0 as input samples enter the
filter. To keep track of the position of the commutator, the mfilt
object uses the property InputOffset which reports the current
position of the commutator in the filter.
The following figure details the signal flow for the direct form FIR filter
implemented by mfilt.firtdecim.
Notice the order of the states in the filter flow diagram. States 1 through 3 appear
in the following diagram at each delay element. State 1 applies to the third delay
element in phase 2. State 2 applies to the second delay element in phase 2. State 3
applies to the first delay element in phase 2. When you provide the states for the
filter as a vector to the States property, the above description
explains how the filter assigns the states you specify.
In property value form, the states for a filter hm are
hm.states=[1:3];
Examples
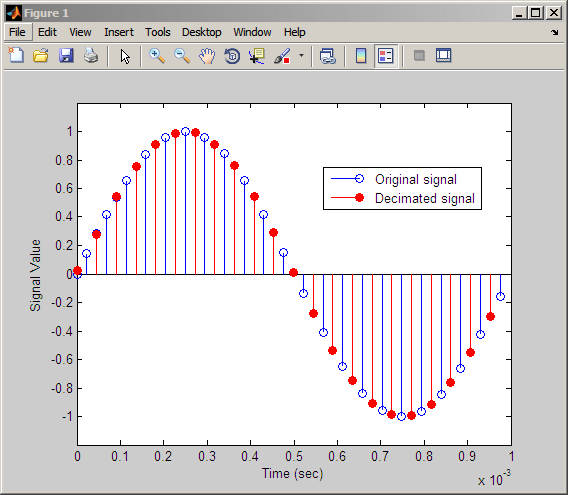
Demonstrate decimating an input signal by a factor of 2, in this case converting from 44.1 kHz down to 22.05 kHz. In the figure shown following the code, you see the results of decimating the signal.
m = 2; % Decimation factor.
hm = mfilt.firtdecim(m); % Use the default filter coeffs.
fs = 44.1e3; % Original sample freq: 44.1 kHz.
n = 0:10239; % 10240 samples, 0.232 second long signal
x = sin(2*pi*1e3/fs*n); % Original signal--sinusoid at 1 kHz.
y = filter(hm,x); % 5120 samples, 0.232 seconds.
stem(n(1:44)/fs,x(1:44)) % Plot original sampled at 44.1 kHz.
axis([0 0.001 -1.2 1.2]);
hold on % Plot decimated signal (22.05 kHz) in red
stem(n(1:22)/(fs/m),y(13:34),'r','filled')
xlabel('Time (sec)');ylabel('Signal Value');
legend('Original signal','Decimated signal','location','best');