mfilt.holdinterp
(Removed) FIR hold interpolator
mfilt.holdinterp has been removed. Use dsp.FIRInterpolator(L,'ZOH')
instead. For more details, see Version History.
Syntax
hm = mfilt.holdinterp(l)
Description
hm = mfilt.holdinterp(l) returns the object
hm that represents a hold interpolator with the interpolation
factor l. To work, l must be an integer. When you
do not include l in the calling syntax, it defaults to 2. To perform
interpolation by noninteger amounts, use one of the fractional interpolator objects,
such as mfilt.firsrc.
When you use this hold interpolator, each sample added to the input signal between
existing samples has the value of the most recent sample from the original signal. Thus
you see something like a staircase profile where the interpolated samples form a plateau
between the previous and next original samples. The example demonstrates this profile
clearly. Compare this to the interpolation process for other interpolators in the
toolbox, such as mfilt.linearinterp.
Make this filter a fixed-point or single-precision filter by changing the value of the
Arithmetic property for the filter hm as
follows:
To change to single-precision filtering, enter
set(hm,'arithmetic','single');
To change to fixed-point filtering, enter
set(hm,'arithmetic','fixed');
Input Arguments
The following table describes the input arguments for creating
hm.
Input Argument | Description |
|---|---|
| Interpolation factor for the filter. |
Object Properties
This section describes the properties for both floating-point filters (double-precision and single-precision) and fixed-point filters.
Floating-Point Filter Properties
Every multirate filter object has properties that govern the way it behaves when
you use it. Note that many of the properties are also input arguments for creating
mfilt.holdinterp objects. The next table describes each
property for an mfilt.interp filter object.
Name | Values | Description |
|---|---|---|
|
| Specifies the arithmetic the filter uses to process data while filtering. |
| Character vector | Reports the type of filter object. You cannot set this
property — it is always read only and results from your
choice of |
| Integer | Interpolation factor for the filter. |
| ' | Determines whether the filter states are restored to zero for each filtering operation. |
| Double or single array | Filter states. |
Fixed-Point Filter Properties
This table shows the properties associated with the fixed-point implementation of
the mfilt.holdinterp filter.
Note
The table lists all of the properties that a fixed-point filter can have. Many of the properties listed are dynamic, meaning they exist only in response to the settings of other properties. To view all of the characteristics for a filter at any time, use
info(hm)
where hm is a filter.
For further information about the properties of this filter or any
mfilt object, refer to Multirate Filter Properties.
Name | Values | Description |
|---|---|---|
|
| Specifies the arithmetic the filter uses to process data while filtering. |
| Character vector | Reports the type of filter object. You cannot set this
property — it is always read only and results from your
choice of |
| Any positive or negative integer number of bits [15] | Specifies the fraction length the filter uses to interpret input data. |
| Any integer number of bits [16] | Specifies the word length applied to interpret input data. |
| Integer | Interpolation factor for the filter. |
|
| Determine whether the filter states get restored to zero for each filtering operation |
|
| Contains the filter states before, during, and after filter
operations. For hold interpolators, the states are always empty
— hold interpolators do not have states. The states use
|
Filter Structure
Hold interpolators do not have filter coefficients and their filter structure is trivial.
Examples
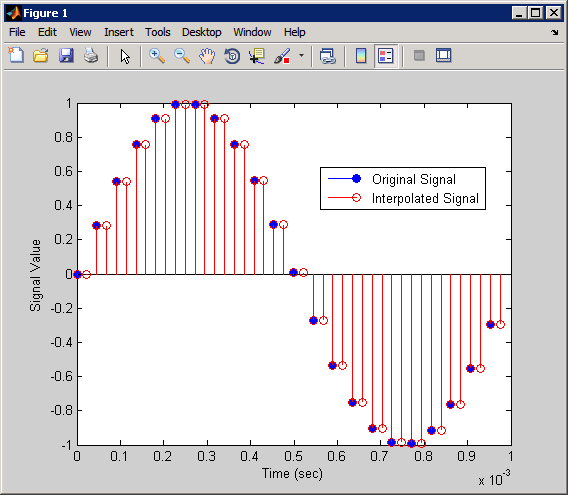
To see the effects of hold-based interpolation, interpolate an input sine wave from 22.05 to 44.1 kHz. Note that each added sample retains the value of the most recent original sample.
l = 2; % Interpolation factor hm = mfilt.holdinterp(l); fs = 22.05e3; % Original sample freq: 22.05 kHz. n = 0:5119; % 5120 samples, 0.232 second long signal x = sin(2*pi*1e3/fs*n); % Original signal, sinusoid at 1 kHz y = filter(hm,x); % 10240 samples, still 0.232 seconds stem(n(1:22)/fs,x(1:22),'filled') % Plot original sampled at % 22.05 kHz hold on % Plot interpolated signal (44.1 kHz) stem(n(1:44)/(fs*l),y(1:44),'r') legend('Original Signal','Interpolated Signal','Location','best'); xlabel('Time (sec)');ylabel('Signal Value')
The following figure shows clearly the step nature of the signal that comes from
interpolating the signal using the hold algorithm approach. Compare the output to the
linear interpolation used in mfilt.linearinterp.