Remove High-Frequency Noise from Gyroscope Data
This example shows how to remove the high-frequency outliers from a streaming signal using the dsp.MedianFilter System object?.
Use the dsp.MatFileReader System object to read the gyroscope MAT file. The gyroscope MAT file contains 3 columns of data, with each column containing 7140 samples. The three columns represent the X-axis, Y-axis, and Z-axis data from the gyroscope motion sensor. Choose a frame size of 714 samples so that each column of the data contains 10 frames. The dsp.MedianFilter System object uses a window length of 10. Create a timescope object to view the filtered output.
reader = dsp.MatFileReader('SamplesPerFrame',714,... 'Filename','LSM9DS1gyroData73.mat',... 'VariableName','data'); medFilt = dsp.MedianFilter(10); scope = timescope('NumInputPorts',1,... 'SampleRate',119,... 'YLimits',[-300 300],... 'ChannelNames',{'Input','Filtered Output'},... 'TimeSpanSource','Property',... 'TimeSpan',60,'ShowLegend',true);
Filter the gyroscope data using the dsp.MedianFilter System object. View the filtered Z-axis data in the time scope.
for i = 1:10 gyroData = reader(); filteredData = medFilt(gyroData); scope([gyroData(:,3),filteredData(:,3)]); end
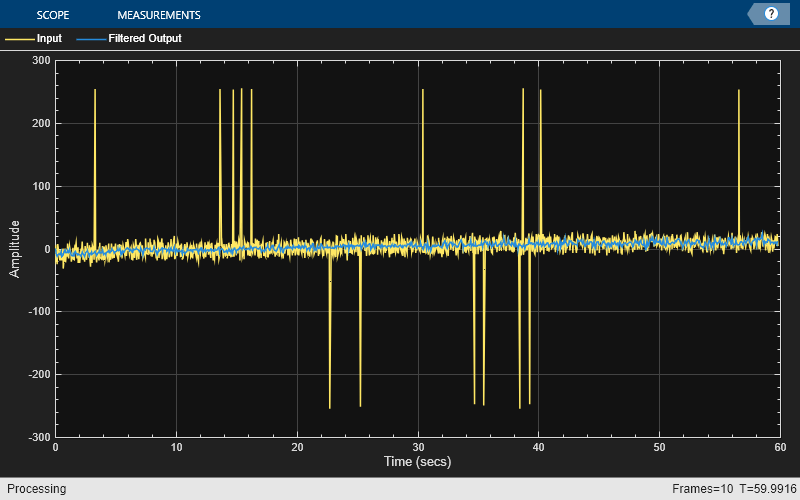
The original data contains several outliers. Zoom in on the data to confirm that the median filter removes all the outliers.