Track Simulated Vehicles Using GNN and JPDA Trackers in Simulink
This example shows how to configure and utilize GNN and JPDA trackers in a simulated highway scenario in Simulink® with Sensor Fusion and Tracking Toolbox™. It closely follows the Sensor Fusion Using Synthetic Radar and Vision Data in Simulink (Automated Driving Toolbox). A main benefit of modeling the system in Simulink is the simplicity of performing "what-if" analysis and choosing a tracker that results in the best performance based on the requirements.
Introduction
Synthetic radar and vision data help us in evaluating the target tracking algorithms. This example primarily focuses on the tracking abilities of trackerGNN and trackerJPDA in Simulink.
Setup and Overview of the Model
The setup of this example is the same as the setup of Sensor Fusion Using Synthetic Radar and Vision Data in Simulink (Automated Driving Toolbox) example, except that the simulated detections are concatenated as the input to the Trackers block.
![]()
Trackers
The Trackers block is a variant subsystem, which you can use to switch between the GNN tracker and the JPDA tracker.
The first variant of the Trackers block, trackerGNN, assumes a constant velocity motion model and an extended Kalman filter by setting the Filter initialization function as the default initcvekf.

With GNN tracker, you can choose your own customized filter which fits the motion of the simulated objects. You can choose the assignment algorithm among MatchPairs, Munkres, Jonker-Volgenant, Auction and your own customized assignment algorithm. You can also specify the track maintenance logic as History or Score.
The second variant of the Trackers block, trackerJPDA, also assumes a constant velocity motion model and an extended Kalman filter by the default filter initialization function initcvekf.
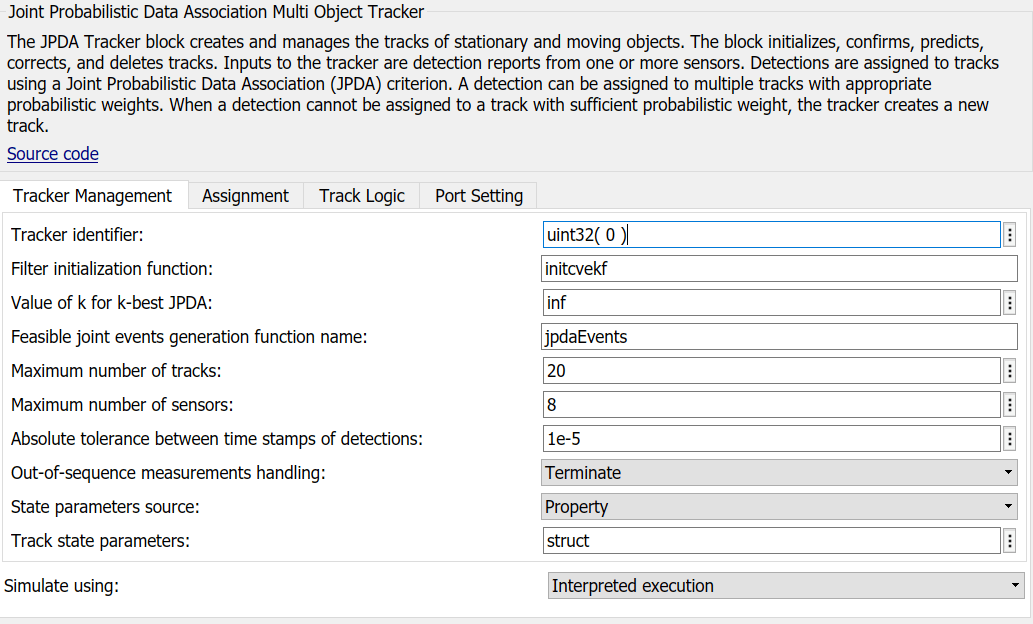
With trackerJPDA, you can customize your own filter initialization function and choose between the History and the Integrated track logic.
You can select your preferable subsystem by setting the value of conditional variable Tracker in the base workspace. The following table shows the Tracker values corresponding to their configurations.
![]()
You can also use the Edit and Manage Workspace Variables by Using Model Explorer (Simulink) to change the value of Tracker.

Track Metrics
The Track Metrics is implemented using a MATLAB System (Simulink) block. The code for the block is defined by a helper class, HelperTrackMetrics.
Results
To visualize the results, use the Bird's-Eye Scope. The Bird's-Eye Scope is a model-level visualization tool via a menu provided on the Simulink model toolbar. After opening the scope, click Find Signals to set up the signals. Then run the simulation to display the actors, vision and radar detections, tracks, and road boundaries. The following image shows the bird's-eye scope for this example.
In Simulink, you can run this example via interpreted execution or code generation. With interpreted execution, the model simulates the block using the MATLAB® execution engine which allows faster startup time but longer execution time. With code generation, the model simulates the block using the subset of MATLAB code supported for code generation which allows better performance than the interpreted execution.
After running the model, you can visualize the results on the figures below.
![]()
The above figure shows the tracking results using synthetic radar and vision data with trackerGNN. You can see that the tracker maintained tracks throughout the tracking region.
![]()
The above figure shows the tracking results using synthetic radar and vision data with trackerJPDA. You can see that the tracker maintained tracks throughout the tracking region and the tracking performance is better than that of trackerGNN as there are fewer false tracks generated.
Evaluate Tracking Performance
You can use the Track Metrics block to evaluate the tracking performance of each tracker using quantitative metrics. In this example, you view the number of target tracks, the number of redundant tracks, and the number of false tracks. A target track is a track that is associated with unique targets. A redundant track is a track that is associated with a ground truth object that has been associated to another track. A false track is a track that is not associated with any ground truth objects. Below the first figure shows the tracking performance results of GNN tracker and the second figure shows the results of JPDA tracker.

The assignment metrics illustrate that one redundant track was initialized and confirmed by trackerGNN, whereas trackerJPDA does not create any redundant tracks. The redundant tracks were generated due to imperfect clustering, where detections belonging to the same target were clustered into more than one cluster. Also, the trackerGNN created and confirmed three false tracks whereas trackerJPDA confirmed only one false track. These metrics show that trackerJPDA provides better tracking performance than trackerGNN.
Summary
This example shows how to generate a scenario, simulate sensor detections, and use these detections to track moving vehicles around the ego vehicle using the trackerGNN and trackerJPDA blocks in Simulink. You have also seen the simplicity of exchanging between the two trackers, the flexibility of customizing these trackers to suit your own target tracking requirements, and the ability to evaluate the tracking results using track metrics.