解决可行性问题
有些问题要求您找到一个满足所有约束的点,而没有目标函数需要最小化。例如,假设您有以下约束:
是否有任何点 满足约束?为了找出答案,请编写一个函数,返回结构体字段 Ineq 中的约束。以二元素向量 而不是 的形式写出约束。将每个不等式写成函数 ,即不等式 ,通过从每个不等式的两边减去其右边。为了能够绘图,请以向量化的方式编写函数,其中每行代表一个点。该辅助函数的代码名为 objconstr,出现在本示例的末尾。
绘制三个函数满足 和 等式的点,并通过绘制等于 -1/2 的函数值水平线来表示不等式。
[XX,YY] = meshgrid(-2:0.1:2,-4:0.1:2); ZZ = objconstr([XX(:),YY(:)]).Ineq; ZZ = reshape(ZZ,[size(XX),3]); h = figure; ax = gca; contour(ax,XX,YY,ZZ(:,:,1),[-1/2 0],'r','ShowText','on'); hold on contour(ax,XX,YY,ZZ(:,:,2),[-1/2 0],'k','ShowText','on'); contour(ax,XX,YY,ZZ(:,:,3),[-1/2 0],'b','ShowText','on'); hold off
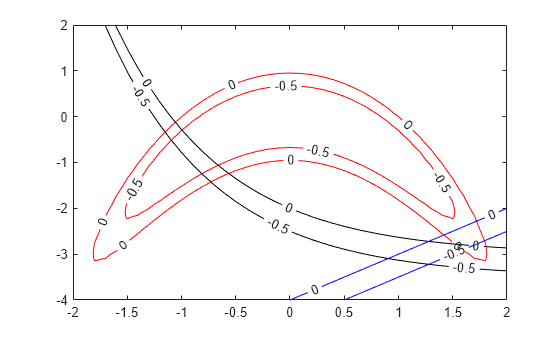
该图表明可行点位于 [1.75,-3] 附近。
设定下界为 -5,上界为 3,然后使用 surrogateopt 解决问题。
rng(1) % For reproducibility
lb = [-5,-5];
ub = [3,3];
[x,fval,exitflag,output,trials] = surrogateopt(@objconstr,lb,ub)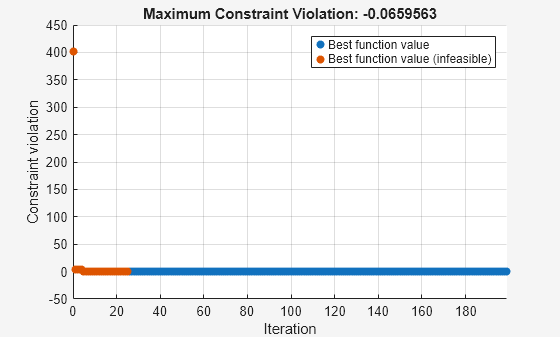
surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
x = 1×2
1.7553 -3.0551
fval = 1×0 empty double row vector
exitflag = 0
output = struct with fields:
elapsedtime: 14.9366
funccount: 200
constrviolation: -0.0660
ineq: [-0.0660 -0.2280 -0.8104]
rngstate: [1×1 struct]
message: 'surrogateopt stopped because it exceeded the function evaluation limit set by ↵'options.MaxFunctionEvaluations'.'
trials = struct with fields:
X: [200×2 double]
Ineq: [200×3 double]
检查返回的解 x 的可行性。
disp(output.ineq)
-0.0660 -0.2280 -0.8104
等效地,在返回的解 objconstr 处评估函数 x。
disp(objconstr(x).Ineq)
-0.0660 -0.2280 -0.8104
等效地,检查 trials 结构体中的 Ineq 字段以求解 x。首先,在 x 字段中找到 trials.X 的索引。
indx = ismember(trials.X,x,'rows');
disp(trials.Ineq(indx,:))-0.0660 -0.2280 -0.8104
所有约束函数值都为负,表明点 x 是可行的。
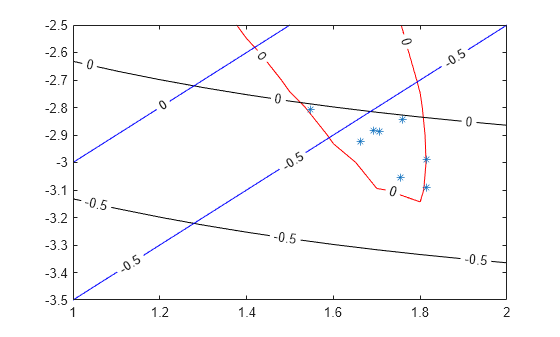
查看由 surrogateopt 评估的可行点。
opts = optimoptions("surrogateopt"); indx = max(trials.Ineq,[],2) <= opts.ConstraintTolerance; % Indices of feasible points figure(h); hold on plot(trials.X(indx,1),trials.X(indx,2),'*') xlim([1 2]) ylim([-3.5 -2.5]) hold off
以下代码创建 objconstr 辅助函数。
function f = objconstr(x) c(:,1) = (x(:,2) + x(:,1).^2).^2 + 0.1*x(:,2).^2 - 1; c(:,2) = x(:,2) - exp(-x(:,1)) + 3; c(:,3) = x(:,2) - x(:,1) + 4; f.Ineq = c; end