修改 surrogateopt 选项
此示例说明如何通过对具有六个局部极小值的二维问题运行 surrogateopt 来寻找全局最小值。然后,示例展示如何修改一些选项以更有效地搜索。
定义目标函数 sixmin 如下。
sixmin = @(x)(4*x(:,1).^2 - 2.1*x(:,1).^4 + x(:,1).^6/3 ...
+ x(:,1).*x(:,2) - 4*x(:,2).^2 + 4*x(:,2).^4);绘制函数。
[X,Y] = meshgrid(linspace(-2.1,2.1),linspace(-1.2,1.2)); Z = sixmin([X(:),Y(:)]); Z = reshape(Z,size(X)); surf(X,Y,Z,'EdgeColor','none') view(-139,31)
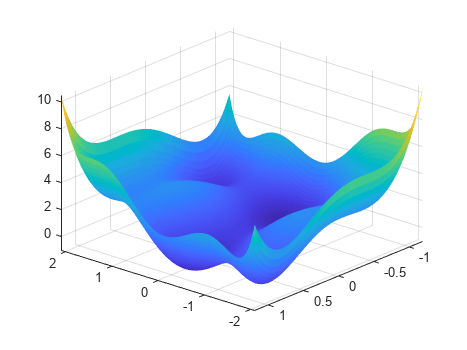
该函数有六个局部极小值和两个全局极小值。
使用 surrogateopt 绘图函数在每个方向由 'surrogateoptplot' 限定的区域中对问题运行 [-2.1,2.1]。要了解 'surrogateoptplot' 图,请参阅 解释 surrogateoptplot。
rng default lb = [-2.1,-2.1]; ub = -lb; opts = optimoptions('surrogateopt','PlotFcn','surrogateoptplot'); [xs,fvals,eflags,outputs] = surrogateopt(sixmin,lb,ub,opts);
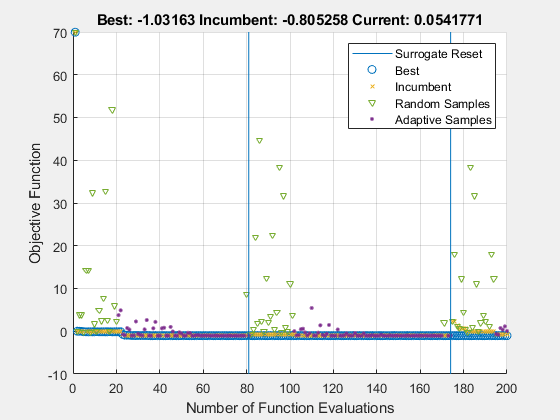
surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
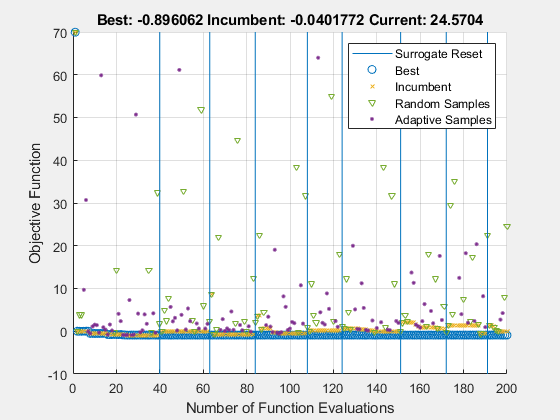
为 MinSurrogatePoints 选项设置一个较小的值,看看这个变化是否有助于求解器更快地达到全局最小值。
opts.MinSurrogatePoints = 4; [xs2,fvals2,eflags2,outputs2] = surrogateopt(sixmin,lb,ub,opts);

surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
较小的 MinSurrogatePoints 选项不会明显改变求解器的行为。
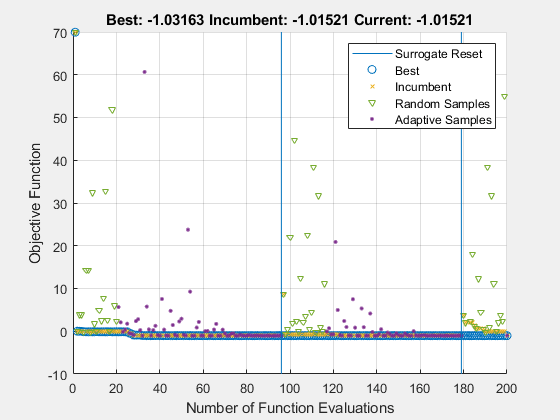
尝试设置 MinSampleDistance 选项的更大值。
opts.MinSampleDistance = 0.05; [xs3,fvals3,eflags3,outputs3] = surrogateopt(sixmin,lb,ub,opts);
surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
改变 MinSampleDistance 选项对求解器的影响很小。此设置会导致替代更频繁地重置,并导致最佳目标函数比以前略高(更差)。
尝试使用并行处理。对 camelback 函数(sixmin 函数的一个变体)的并行处理和非并行处理的执行进行计时。为了模拟耗时的函数,camelback 函数在每次函数评估时都会增加一秒钟的暂停。
type camelbackfunction y = camelback(x)
y = (4*x(1)^2 - 2.1*x(1)^4 + x(1)^6/3 ...
+ x(1)*x(2) - 4*x(2)^2 + 4*x(2)^4);
pause(1)
tic opts = optimoptions('surrogateopt','UseParallel',true,'PlotFcn','surrogateoptplot'); [xs4,fvals4,eflags4,outputs4] = surrogateopt(@camelback,lb,ub,opts);

surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
toc
Elapsed time is 40.111853 seconds.
当串行运行同一问题时对求解器进行计时。
opts.UseParallel = false; tic [xs5,fvals5,eflags5,outputs5] = surrogateopt(@camelback,lb,ub,opts);
surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
toc
Elapsed time is 224.924526 seconds.
对于耗时的目标函数,并行处理可以显著提高速度,且不会过度影响结果。