camresponse
Estimate camera response function
Syntax
Description
crf = camresponse(imds)ImageDatastore object,
imds.
Examples
Specify a set of six low dynamic range (LDR) images that are spatially registered. These LDR images have same f-stop values and varying exposure times.
files = ["office_1.jpg","office_2.jpg","office_3.jpg",... "office_4.jpg","office_5.jpg","office_6.jpg"];
Estimate the camera response function from the set of specified images.
crf = camresponse(files);
Specify the range of intensity levels in the input images.
range = 0:length(crf)-1;
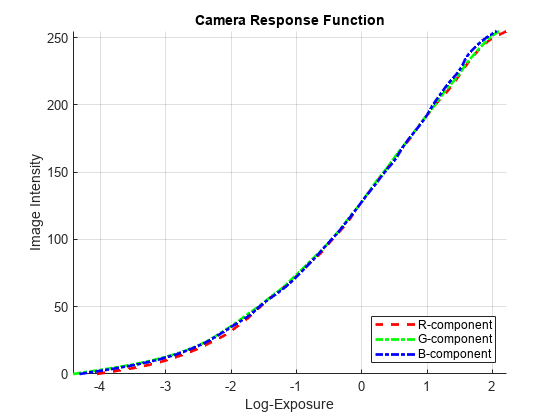
Plot the estimated camera response function for each of the red, green, and blue color components. The plot shows the relationship between log-exposure and image intensity.
figure hold on plot(crf(:,1),range,'--r','LineWidth',2); plot(crf(:,2),range,'-.g','LineWidth',2); plot(crf(:,3),range,'-.b','LineWidth',2); xlabel('Log-Exposure'); ylabel('Image Intensity'); title('Camera Response Function'); grid on axis('tight') legend('R-component','G-component','B-component','Location','southeast')
Create an ImageDatastore object containing six low dynamic range (LDR) images.
setDir = fullfile(toolboxdir('images'),'imdata','office_*'); imds = imageDatastore(setDir);
Display the images in a montage.
montage(imds,'Size',[6 1])
Specify the exposure time for each image in the ImageDatastore object.
expTimes = [0.0333 0.1000 0.3333 0.6250 1.3000 4.0000];
Estimate the camera response function from the images in the datastore, specifying the exposure times.
crf = camresponse(imds,'ExposureTimes',expTimes);Specify the range of intensity values in the input images.
range = 0:length(crf)-1;
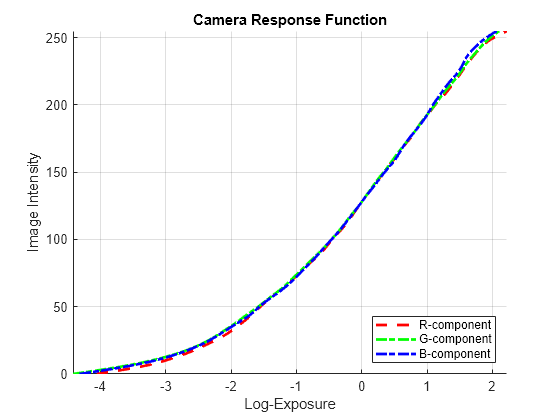
Plot the estimated camera response function for each of the R, G, and B color components. The plot shows the relationship between log-exposure and image intensity.
figure hold on plot(crf(:,1),range,'--r','LineWidth',2); plot(crf(:,2),range,'-.g','LineWidth',2); plot(crf(:,3),range,'-.b','LineWidth',2); xlabel('Log-Exposure'); ylabel('Image Intensity'); title('Camera Response Function'); grid on axis('tight') legend('R-component','G-component','B-component','Location','southeast')
Input Arguments
Output Arguments
Tips
This function requires a minimum of two images with different exposure times. A larger number of images yields a better estimate of
crfat the expense of more processing time.The input image files in
filesandimdsmust contain the Exchangeable Image File Format (EXIF) exposure metadata. To estimate thecrfvalues, the function reads the exposure time in the EXIF metadata. If you specifyexpTimes, the function overrides the exposure time in the EXIF metadata.
References
[1] Debevec, P.E., and J. Malik. "Recovering High Dynamic Range Radiance Maps from Photographs." In ACM SIGGRAPH 2008 classes, Article No. 31. New York, NY: ACM, 2008.
Version History
Introduced in R2019a