matchScansGrid
Estimate pose between two lidar scans using grid-based search
Syntax
Description
pose = matchScansGrid(currScan,refScan)lidarScan and a current lidarScan object using a grid-based search.
matchScansGrid converts lidar scan pairs into
probabilistic grids and finds the pose between the two scans by correlating
their grids. The function uses a branch-and-bound strategy to speed up
computation over large discretized search windows.
[___] = matchScansGrid(___,Name,Value)
specifies options using one or more Name,Value pair
arguments. For example, 'InitialPose',[1 1 pi/2] specifies an
initial pose estimate for scan matching.
Examples
Perform scan matching using a grid-based search to estimate the pose between two laser scans. Generate a probabilistic grid from the scans and estimate the pose difference from those grids.
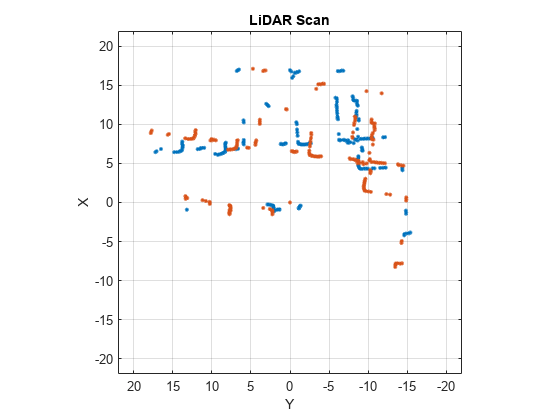
Load the laser scan data. These two scans are from an actual lidar sensor with changes in the robot pose and are stored as lidarScan objects.
load laserScans.mat scan scan2 plot(scan) hold on plot(scan2) hold off
Use matchScansGrid to estimate the pose between the two scans.
relPose = matchScansGrid(scan2,scan);
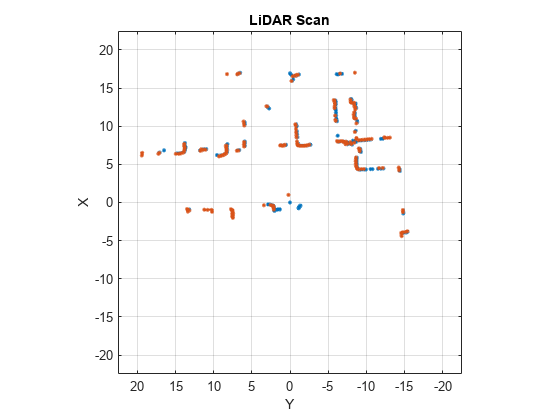
Using the estimated pose, transform the current scan back to the reference scan. The scans overlap closely when you plot them together.
scan2Tformed = transformScan(scan2,relPose); plot(scan) hold on plot(scan2Tformed) hold off
Input Arguments
Name-Value Arguments
Output Arguments
References
[1] Hess, Wolfgang, Damon Kohler, Holger Rapp, and Daniel Andor. "Real-Time Loop Closure in 2D LIDAR SLAM." 2016 IEEE International Conference on Robotics and Automation (ICRA). 2016.
Extended Capabilities
Version History
Introduced in R2020b