read
Description
Add-On Required: This feature requires the Lidar Toolbox Support Package for SICK Lidar Sensors add-on.
Examples
Create a sicklidar2d object. Ensure that you specify the correct IP address for your sensor.
slObj = sicklidar2d(IPAddress="172.18.252.146");Read the latest 2-D lidar scan by using the read function of the sicklidar2d object.
scan = read(slObj);
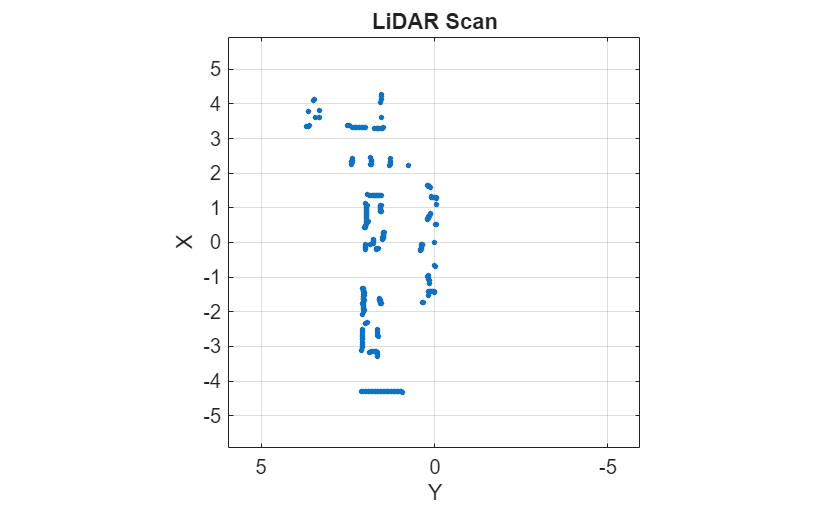
Plot all the points of the lidar scan.
plot(scan)
Input Arguments
Output Arguments
Version History
Introduced in R2026a