lsm303c
Connect to LSM303C sensor Arduino hardware I2C bus
Description
Add-On Required: This feature requires the MATLAB Support Package for Arduino Hardware add-on.
The lsm303c object reads linear acceleration, magnetic field
strength, and temperature using the LSM303C sensor connected to the I2C bus of the hardware.
The LSM303C is an inertial measurement unit (IMU) used to read acceleration and magnetic field
in all three dimensions. The LSM303C also has an embedded temperature sensor. Attach an
LSM303C sensor to the I2C pins on the hardware. You can read the data from your sensor in
MATLAB® using the Object Functions.
Creation
Description
imu = lsm303c(a)
Example:
imu = lsm303c(a);.
imu = lsm303c(a,Name,Value)Name,Value
pair arguments.
Example:
imu = lsm303c(a, 'Bus', 1);.
Input Arguments
Name-Value Arguments
Properties
Note
Except for TimeFormat, all the other properties are non-tunable,
which means you cannot change their values once the object is locked. Objects are locked
when you call the read function, and the release
function unlocks them. If a property is tunable, you can change its value at any
time.
The rate in samples/s at which data is read from the sensor.
Data Types: double
Number of samples read from the sensor in a single execution of the
read function.
Data Types: double
Specify whether to return the latest or the oldest data samples. The number of
samples depends on the SamplesPerRead value. The data read from the
sensor is stored in the MATLAB buffer.
latest—Provides the latest data samples available in the buffer. All previous data samples in the buffer are discarded. For example, if
SamplesPerRead= 3, the latest three data samples read by the sensor are returned.The following figure illustrates how latest data samples are returned assuming S1 is the first sensor data stored in the buffer, S2 is the second data and so on and Sn is the last data stored in the buffer and
SamplesPerReadproperty is set to 3 during sensor object creation.
oldest—Provides the oldest data samples available in the buffer. In this case, no data samples are discarded. For example, if
SamplesPerRead= 3, the first three data samples read are returned for the first read, the next three data samples are returned for the second read, and so on.The following figure illustrates how oldest data samples are returned assuming S1 is the first sensor data stored in the buffer, S2 is the second data and so on and Sn is the last data stored in the buffer and
SamplesPerReadproperty is set to 3 during sensor object creation.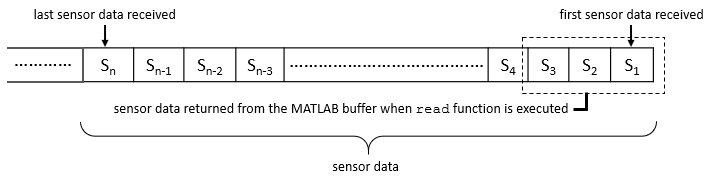
Data Types: character vector | string
This property is read-only.
Samplesread property outputs the values of samples read so far by
executing read function. Samplesread is set to
0, when the object is created or when you
release the object.
Data Types: double
This property is read-only.
Samples available in the host buffer. The data read from the sensor is stored in the
MATLAB buffer. SamplesAvailable property shows the number of
SamplesAvailable in this host buffer. When you release the object,
SamplesAvailable is set to 0. When the ReadMode
of sensor is set as latest, SamplesAvailable will
always be 0.
The SamplesAvailable property is updated only when you invoke the
read() function, which refreshes the data buffers in the
background.
Data Types: double
Set the output format of the data returned by executing the
read function.
When the OutputFormat is set to timetable,
the data returned has the following fields:
Time — Time stamps in
datetimeordurationformatAcceleration — N-by-3 array in units of m/s2
MagneticField — N-by-3 array in units of µT
Temperature — N-by-1 array in units of degree Celsius
When the OutputFormat is set to matrix, the
data is returned as matrices of acceleration, magnetic field, temperature, and time
stamps. The units and size for the sensor readings are the same as the
timetable format.
N is the number of samples per read specified by
SamplesPerRead. The three columns of each field represent the
measurements in x, y, and z axes.
Data Types: character vector | string
Set the format of the time displayed when the sensor data is read.
datetime— Displays the date and time at which the data is read.duration— Displays the time elapsed in seconds after the sensor object is locked. The sensor object gets locked at the first call of thereadfunction either after the object creation or after the execution of thereleasefunction.
Data Types: character vector | string
Object Functions
readAcceleration | Read one sample of acceleration from sensor |
readMagneticField | Read one sample of magnetic field from sensor |
readTemperature | Read one sample of temperature from sensor |
read | Read real-time sensor data at a specified rate |
release | Release the sensor object |
flush | Flush the host buffer |
info | Read information related to sensor |
Examples
Create Connection to LSM303C Sensor
Create an arduino object with the I2C library.
a = arduino('COM4', 'Uno', 'Libraries', 'I2C');
Create the sensor object.
imu = lsm303c(a)
imu =
lsm303c with properties:
I2CAddress: 29 ("0x1D")
: 30 ("0x1E")
Bus: 0
SCLPin: "D21"
SDAPin: "D20"
SampleRate: 100 (Samples/s)
SamplesPerRead: 10
ReadMode: 'latest'
SamplesRead: 0
SamplesAvailable: 0
Show all properties, functions
Show all properties all functionsCreate LSM303C Sensor Connection with Additional Name-Value Pair Arguments
Create a sensor object with additional properties specified as name-value pair arguments.
clear imu; imu = lsm303c(a,'SampleRate',110,'SamplesPerRead',3,'ReadMode','oldest')
imu =
lsm303c with properties:
I2CAddress: 107 ("0x6B")
Bus: 0
SCLPin: "A5"
SDAPin: "A4"
SampleRate: 110 (samples/s)
SamplesPerRead: 3
ReadMode: "oldest"
SamplesRead: 0
SamplesAvailable: 0
Show all properties all functionsMore About
Version History
Introduced in R2021a