磁场定向控制
此主题解释磁场定向控制 (FOC),这是一种常用于控制永磁同步电机 (PMSM) 和 AC 感应电机 (ACIM) 的方法。作为矢量控制的一种形式,FOC 将电机中的电流、电压和磁通表示为 d-q 旋转参考系中的空间矢量。有关矢量控制方法的更多详细信息,请参阅闭环电机控制。
使用实时被控对象反馈,FOC 可确保即使在低速下也能实现电机转速和转矩的最佳和精确控制。由于 FOC 会自动补偿内部和外部扰动,例如电机负载、转速或方向的变化,因此它能提供出色的动态响应。此外,FOC 可减少转矩波纹,从而实现更平稳的运行。
您可以在需要高效和精确控制的应用中使用 FOC,例如在电动汽车、工业驱动器、机器人、航空航天和风力发电机中。
磁场定向控制算法
FOC 使用克拉克变换将三相电流转换为 α-β 静止参考系。然后,它使用帕克变换将电流转换为旋转的 d-q 参考系,在此坐标系中电流由 DC 信号表示。下图说明三个坐标系中归一化的时域相电流。
由于使用更高的增益来减少稳态误差的能力有限,使用 PI 控制器直接控制电机相 AC 电流会导致跟踪响应延迟。然而,使用电机相电流和电压的 d-q 等效量可以提高 PI 控制器的控制效率和性能。由于积分控制会产生最小的稳态误差和非常高的 DC 增益,因此 PI 控制器在控制 DC 信号时效率非常高。
FOC 算法通过使用 PI 控制器控制 d-q 轴电流(控制输入)并生成具有零稳态误差的 d-q 轴电压输出(控制信号)来实现这种效率。然后,该算法使用数学变换将这些电压转换为逆变器的占空比,然后逆变器通过使用对应的三相电压来驱动电机。
FOC 算法将旋转的 d-q 参考系与三相定子电压同步,使两者具有相同的频率和位置。对于像 PMSM 这样的同步电机,定子和转子磁通是对齐的。因此,您可以通过调整 d 轴与转子磁通的方向,将 d-q 参考系与定子电压对齐。为了执行此定向,FOC 需要转子位置,您可以使用物理位置传感器或无传感器位置估计算法获得转子位置。有关这些方法的详细信息,请参阅对磁场定向控制算法进行建模。
FOC 独立控制定子电流的幅值和相位,以使转子匹配参考控制输入。为了实现对电机转速和转矩的精确控制,该算法对定子磁通分量(由 q 轴电流驱动)和转矩(由 d 轴电流驱动)分量进行解耦。该算法通过改变沿 d 轴和 q 轴的电流来独立控制磁通和转矩。在 d 轴与转子磁场对齐的情况下,您可以通过最小化 d 轴电流(定子磁通)并最大化 q 轴电流来生成最大转矩。
对磁场定向控制算法进行建模
FOC 算法使用两个 PI 控制器独立控制 d 轴和 q 轴电流。这些 PI 控制器提供 d-q 轴电压作为控制信号。然后,该算法使用帕克逆变换将这些电压转换为其在静止正交参考系中的 α 轴和 β 轴等效量。FOC 通过调制方法(例如 PWM 调制)使用这些电压生成占空比来驱动逆变器。
将电流变换到 d-q 轴需要转子机械位置反馈,您可以使用位置传感器或无传感器位置估计器获得转子机械位置反馈。
诸如正交编码器、旋转变压器和霍尔效应传感器之类的物理位置传感器检测电机机械位置信息,您可以使用以下 Motor Control Blockset™ 模块对这些信息进行解码:
无传感器位置估计器使用定子上的电气测量值来估计电机的电气位置。Motor Control Blockset 提供以下无传感器位置估计器:
FOC 算法使用转子位置来计算电机转速反馈。
除了构成内电流控制环的 d 轴和 q 轴 PI 电流控制器之外,FOC 还使用具有单独 PI 控制器(在较低采样频率下)的外层转速控制环来控制电机转速。该转速控制环与转矩控制环形成级联。它接受转速参考值作为控制输入,并使用电机转速反馈生成 d 轴和 q 轴参考电流。这些参考电流以最佳方式生成参考转矩,并充当电流控制器的控制输入。因此,通过与电流控制器一起以较低速率运行转速控制器,FOC 算法可以同时遵循转速参考值和转矩参考值。
在您的算法中,您可以使用采样延迟对电流测量期间的滞后进行建模。同样,您可以使用延迟对执行控制算法所需的计算时间进行建模。
永磁同步电机
下图显示 PMSM 的 FOC 架构。有关 Motor Control Blockset 用于为 PMSM 实现 FOC 的详细方程组和假设,请参阅 PMSM 的数学模型。
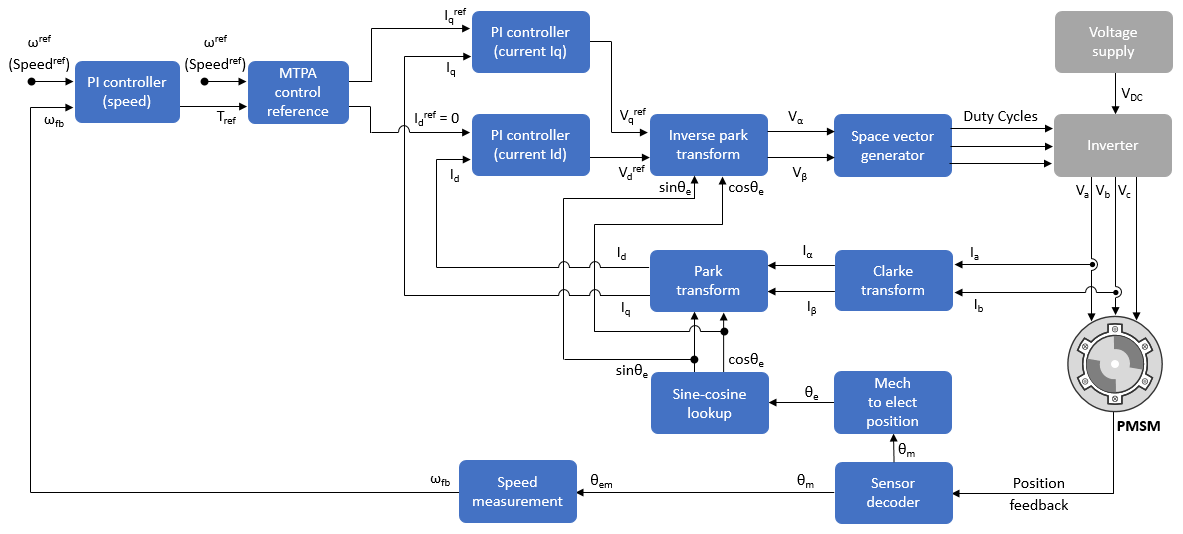
由于内层电流控制环主要用于控制转矩,因此表贴式 PMSM (SPMSM) 的 FOC 算法通常使用零磁通参考值。因此,在对 SPMSM 的 FOC 进行建模时,您可以将 d 轴电流设置为零,并对 q 轴电流参考值使用最大值以最大化所生成的转矩。
然而,在对内置式 PMSM (IPMSM) 的 FOC 进行建模时,您可以通过调整 d 轴和 q 轴电流参考值来利用更高的电机凸极率,从而最大化所生成的转矩。
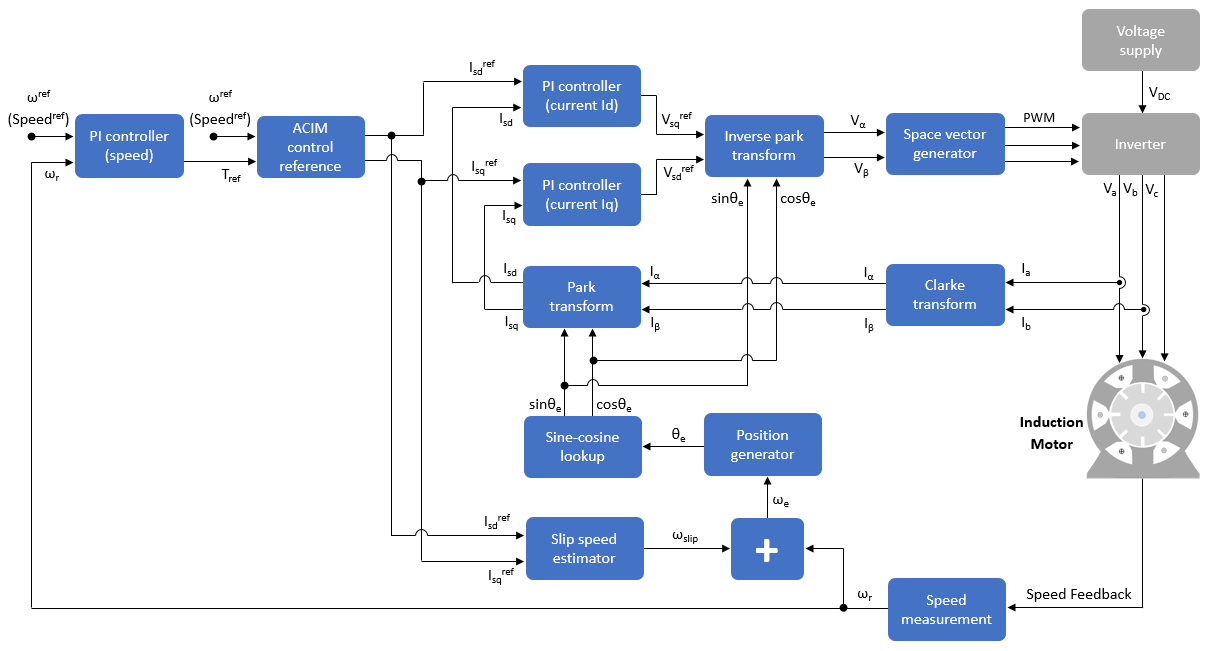
AC 感应电机
下图显示 AC 感应电机 (ACIM) 的 FOC 架构。有关 Motor Control Blockset 用于实现感应电机的 FOC 的详细方程组和假设,请参阅感应电机的数学模型。
调节控制器增益
PI 控制器增益充当确定控制系统的响应性、准确度和稳定性的控制参数。为了获得准确的结果,您必须适当地调节这些增益。您可以使用以下方法来确定 PI 控制器增益:
使用 Field Oriented Control Autotuner 模块调节控制器增益。请参阅使用 Field Oriented Control Autotuner 调节 PI 控制器。
使用 Motor Control Blockset 工具函数调节控制器增益。请参阅估计控制增益并调节控制参数。
使用 PID 调节器调节控制器增益。
使用在线频率响应估计 (FRE) 调节控制器增益。请参阅Online Frequency Response Estimation Basics (Simulink Control Design)。
有关 Motor Control Blockset™ 为调节控制器增益提供的解决方案的更多详细信息,请参阅增益计算和调节。