atan2
计算四象限反正切
库:
Motor Control Blockset /
Controls /
Math Transforms
Motor Control Blockset HDL Support /
Controls /
Math Transforms
描述
atan2 模块对两个实数执行四象限反正切运算。
方程
此方程描述该模块如何计算四象限反正切值 (θ)。
其中:
端口
输入
输出
反正切表示的角度。这是一个从原点到指定点 (x,y) 的矢量与正 x 轴所形成的夹角。
数据类型: single | double | fixed point
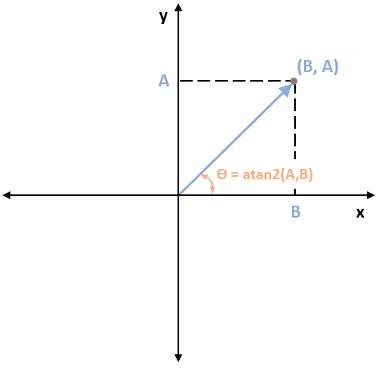
下图显示了输入值 A、B 和反正切在 x-y 坐标平面上的表示。
参数
扩展功能
版本历史记录
在 R2020a 中推出