控制算法设计
创建转矩控制和转速控制子系统,验证目标执行时间,并调节控制增益。
类别
精选示例
Generate Motor Control Models for Selected Algorithm and Hardware
Use Motor Control Blockset™ to generate a Simulink® model that is configured for a specific hardware and motor control technique.
适用于自定义硬件的算法导出工作流
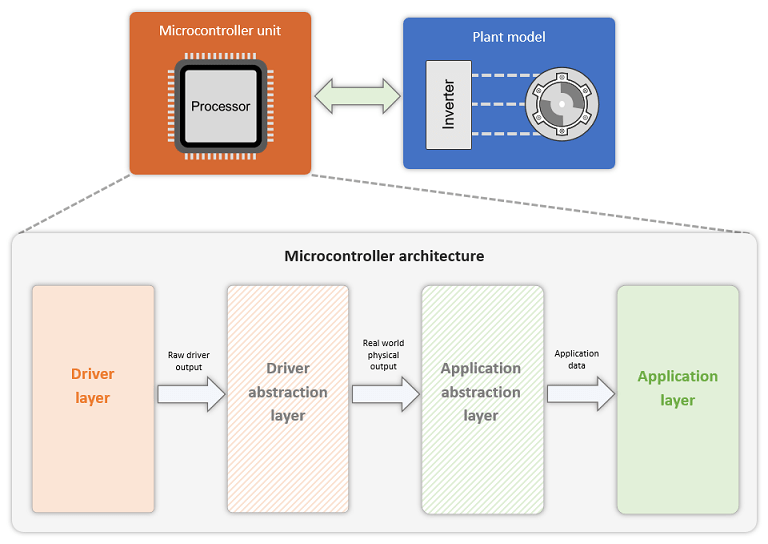
此示例说明如何使用任何自定义电机控制硬件(Motor Control Blockset™ 示例中未使用的硬件)运行使用磁场定向控制 (FOC) 的三相永磁同步电机 (PMSM)。使用算法导出工作流,涉及使用 Simulink® 和 Embedded Coder® 生成控制算法代码,然后将其与手动编写或外部生成的硬件驱动代码集成。此示例说明算法导出工作流以及中间步骤。
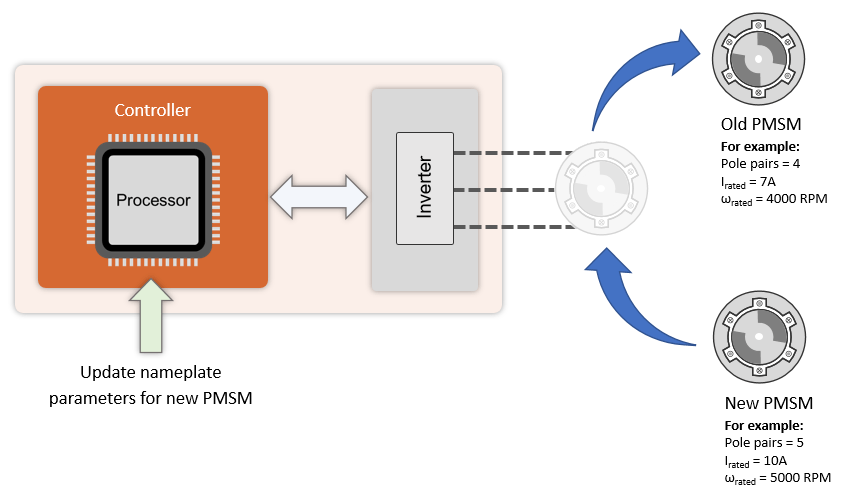
Swap Motors with Single Deployment of Sensorless FOC Algorithm
Run a permanent magnet synchronous motor (PMSM) in an industrial drive application setup using a sensorless field-oriented control (FOC) algorithm. The example uses a sensorless Flux Observer to estimate the motor position. Industrial drives enable you to replace a motor with a new one without repeated deployment of code. An industrial drive setup needs only nameplate parameters to adapt the software to the new motor.

AUTOSAR-Based FOC of PMSM
Implement an AUTOSAR-based field-oriented control (FOC) algorithm to run a permanent magnet synchronous motor (PMSM).
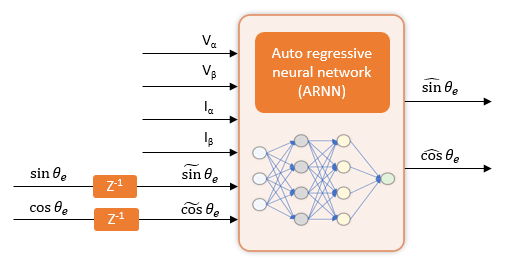
Field-Oriented Control of PMSM Using Position Estimated by Neural Network
Implement field-oriented control (FOC) of a permanent magnet synchronous motor (PMSM) using a rotor position estimated by an autoregressive neural network (ARNN) trained with Deep Learning Toolbox™.

使用强化学习的 PMSM 磁场定向控制
此示例说明如何使用强化学习的控制设计方法来实现永磁同步电机 (PMSM) 的磁场定向控制 (FOC)。此示例使用 FOC 原理。不过,它使用强化学习 (RL) 智能体代替 PI 控制器。有关 FOC 的更多详细信息,请参阅磁场定向控制。
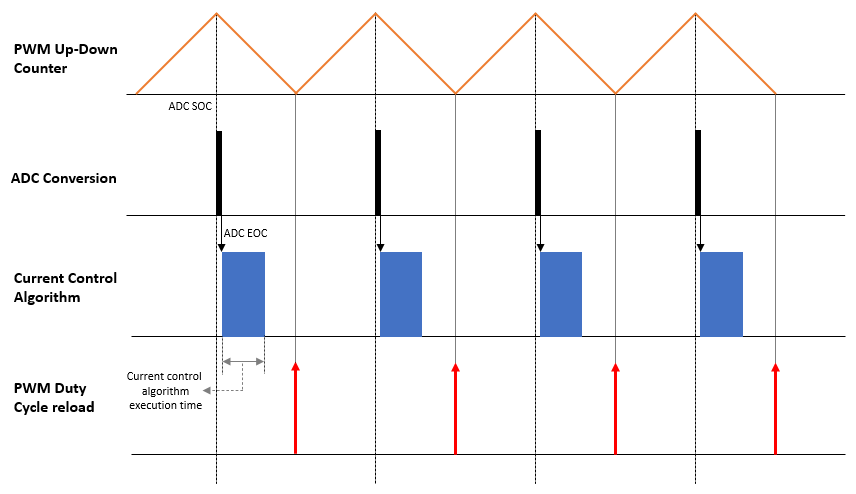
Motor Control Architectures Based on Different Current Sampling and PWM Frequencies
Enables you to implement different motor control architectures that use non-identical sampling rates for ADC conversion, PWM, and current controller algorithm to run a permanent magnet synchronous motor (PMSM) using field-oriented control (FOC).
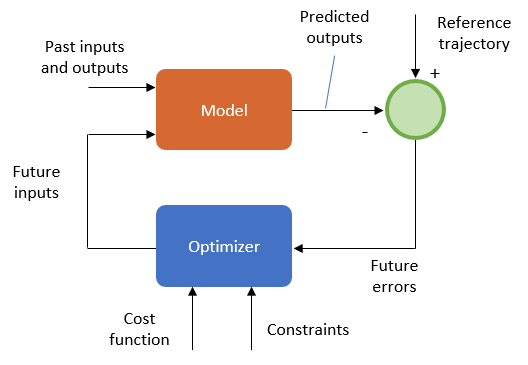
使用模型预测控制进行 PMSM 的磁场定向控制
此示例采用模型预测控制 (MPC) 技术来控制三相永磁同步电机 (PMSM) 的转速。
使用强化学习的 PMSM 磁场定向控制
此示例说明如何使用强化学习的控制设计方法来实现永磁同步电机 (PMSM) 的磁场定向控制 (FOC)。此示例使用 FOC 原理。不过,它使用强化学习 (RL) 智能体代替 PI 控制器。有关 FOC 的更多详细信息,请参阅磁场定向控制。
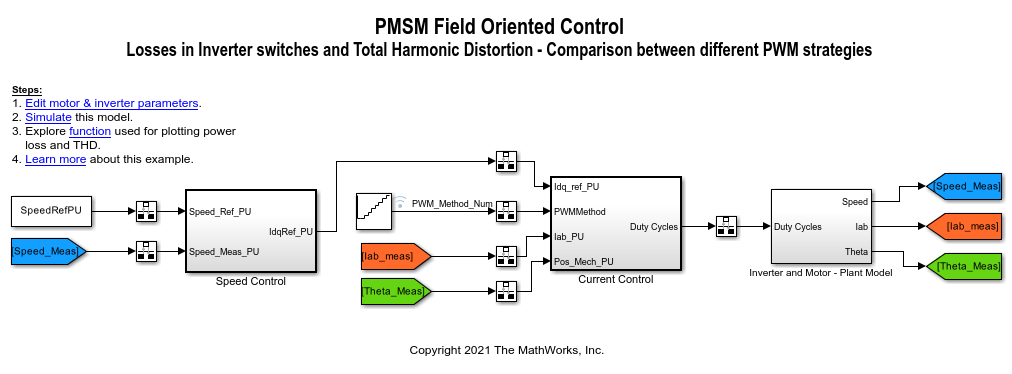
Determine Power Losses and THD for PWM Methods
Calculates the inverter power loss and total harmonic distortion (THD) in motor current for different pulse-width modulation (PWM) methods. The example uses field-oriented control (FOC) algorithm that runs a permanent-magnet synchronous motor (PMSM) in speed control mode as a reference. The example only supports simulation.
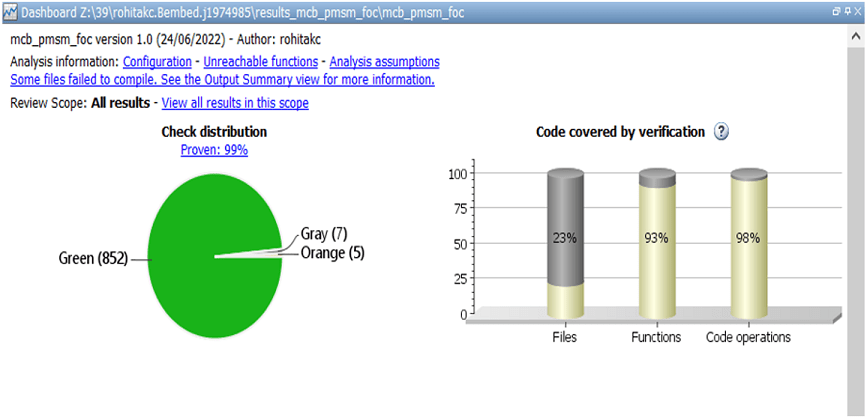
Analyze and Verify Motor Control Algorithms Using Polyspace
Uses the Polyspace® static code analysis tools to analyze and verify Simulink® models containing motor control algorithms. Static code analysis is a software verification technique that analyzes source code for quality, reliability, and security without executing the code. This approach uses robust error detection routines (that include checks for critical run-time errors) to identify bugs and defects and in addition ensures compliance with common coding standards. It provides a cost-effective alternative to measure and track the software quality metrics and eliminates the need to instrument the code or to write elaborate unit test cases.