Dead-Time Compensator
Libraries:
Motor Control Blockset /
Signal Management
Motor Control Blockset HDL Support /
Signal Management
Description
The Dead-Time Compensator block compensates for the inverter dead-time. Use this block to compensate for the dead-time effect of a three-phase inverter.
Three-phase inverters used in motor drive applications are nonlinear in nature. Dead time in an inverter (that is added to avoid short circuit in the inverter legs) contributes significantly to this nonlinearity. Even though dead time ensures safe operation of the inverter, it can adversely affect the performance of the inverter. This causes the inverter output voltage waveform to deviate from its originally expected form.
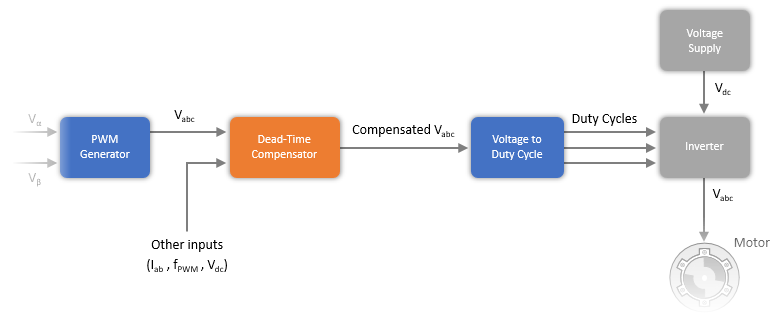
The block accepts three-phase reference voltages, measured motor currents, PWM frequency, and inverter DC voltage as inputs. It provides a three-phase voltage output that compensates for the dead-time effect of the inverter. The compensation helps reduce the noise or ripple in motor torque or currents, and therefore, improves the motor drive performance.
The following image shows the block position inside a motor control algorithm.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2024a