对转速控制器执行手动增益调节
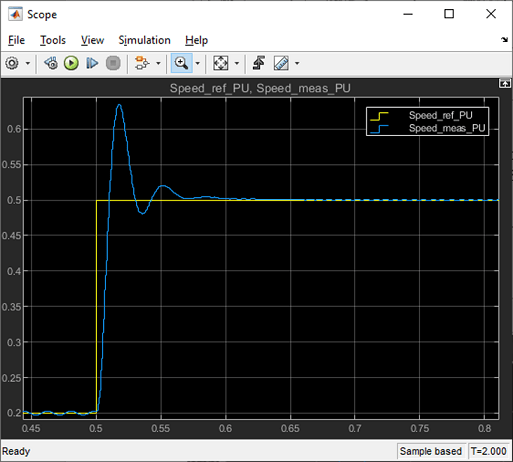
要手动调节转速控制器子系统,请向转速控制器子系统(转速控制)中的 Speed_ref_PU 输入提供阶跃输入(范围为 0.2 到 0.5 PU)。监控测得的转速阶跃响应 Speed_meas_PU,并调整转速控制器子系统参数,以符合您的控制目标。
下图显示转速控制器的阶跃响应。
此过程显示在仿真中实现 PMSM 转速控制的一种方法。运行仿真并分析控制器性能。
您可以使用 Embedded Coder® 从此控制算法生成 C 代码。此外,您还可以将以下代码和硬件驱动部署到目标硬件。