Speed Measurement
根据转子的角位置计算转速
库:
Motor Control Blockset /
Sensor Decoders
Motor Control Blockset HDL Support /
Sensor Decoders
描述
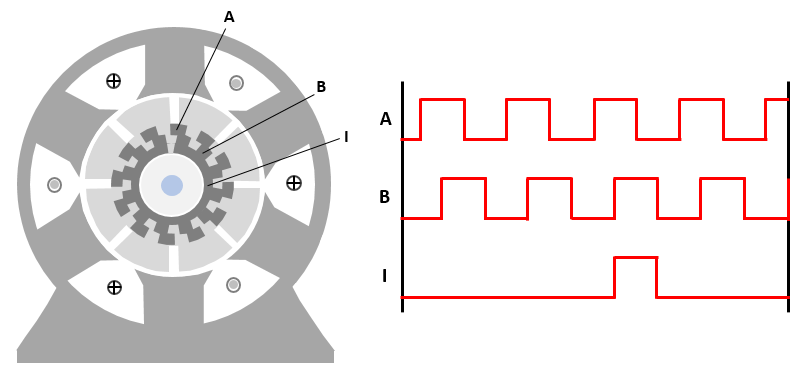
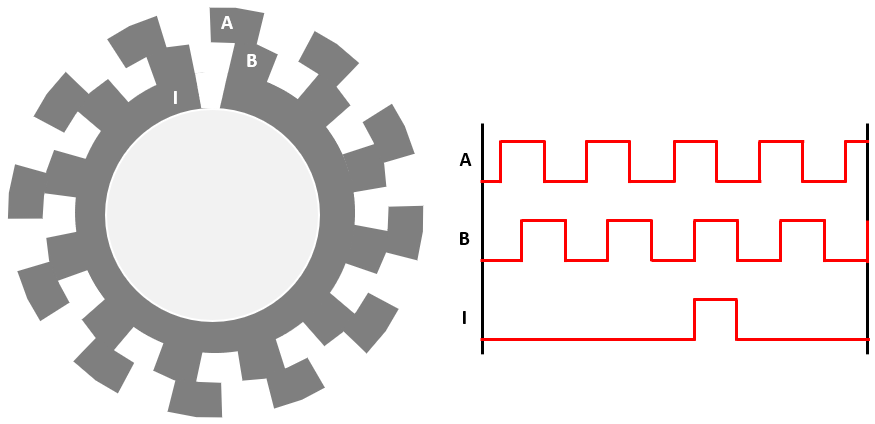
Speed Measurement 模块通过计算角位置相对于时间的变化,根据转子的角位置计算角速度。
示例
使用转速传感器实现感应电机的磁场定向控制
此示例采用磁场定向控制 (FOC) 方法来控制三相 AC 感应电机 (ACIM) 的转速。FOC 算法需要转子转速反馈,在此示例中通过使用正交编码器获得此反馈。有关 FOC 的详细信息,请参阅磁场定向控制。

PMSM 的弱磁控制(使用 MTPA)
此示例采用磁场定向控制 (FOC) 方法来控制三相永磁同步电机 (PMSM) 的转矩和转速。FOC 算法需要转子位置反馈,该反馈通过正交编码器获得。有关 FOC 的详细信息,请参阅磁场定向控制。

使用霍尔传感器的 PMSM 的磁场定向控制
此示例采用磁场定向控制 (FOC) 方法来控制三相永磁同步电机 (PMSM) 的转速。FOC 算法需要转子位置反馈,通过使用霍尔传感器获得该反馈。有关 FOC 的详细信息,请参阅磁场定向控制。
使用正交编码器的 PMSM 磁场定向控制
此示例采用磁场定向控制 (FOC) 方法来控制三相永磁同步电机 (PMSM) 的转速。FOC 算法需要转子位置反馈,该反馈通过正交编码器获得。有关 FOC 的详细信息,请参阅磁场定向控制。