PMSM 的弱磁控制(使用 MTPA)
此示例采用磁场定向控制 (FOC) 方法来控制三相永磁同步电机 (PMSM) 的转矩和转速。FOC 算法需要转子位置反馈,该反馈通过正交编码器获得。有关 FOC 的详细信息,请参阅磁场定向控制。
弱磁控制
当您使用 FOC 算法让电机以额定磁通运行时,最大转速受定子电压、额定电流和反电动势的限制。此转速称为基转速。若超出此转速,机器的运行就会变得复杂,因为反电动势大于供电电压。但是,如果您将 d 轴定子电流 (Id) 设置为负值,则转子磁链会减小,从而使电机以高于基转速的转速运行。这种操作称为电机的弱磁控制。
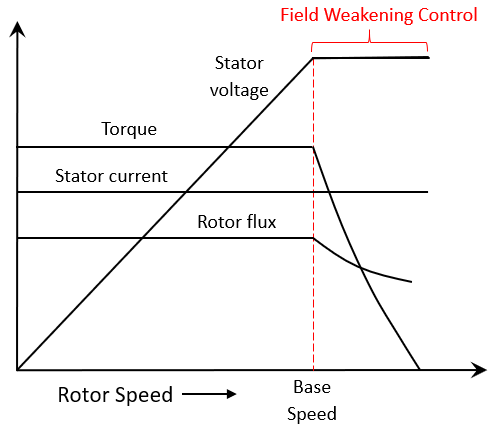
根据机器的连接负载和额定电流,弱磁控制中的 d 轴参考电流 ( ) 也会限制
) 也会限制 q 轴参考电流 ( ),从而限制转矩输出。因此,电机在达到基转速之前一直在恒定转矩区域内运行。如上图所示,它以高于基转速的转速,在有限的转矩下,在恒定功率区域内运行。
),从而限制转矩输出。因此,电机在达到基转速之前一直在恒定转矩区域内运行。如上图所示,它以高于基转速的转速,在有限的转矩下,在恒定功率区域内运行。
参考电流 的计算取决于电机和逆变器参数。
注意:
对于某些表贴式 PMSM,在额定电流下可能无法实现更高的转速,具体情况视参数而定。为了实现更高的转速,您需要用高于额定电流的最大电流使电机重载(如果机器的热条件在允许范围内)。
当电机以高于基转速的转速运行时,我们建议您监控电机的温度。在电机运行期间,如果电机温度升高,超出制造商建议的温度,出于安全原因,请关闭电机。
当电机以高于基转速的转速运行时,我们建议您以小步长增大转速参考值,以避免弱磁所带来的动态变化,这可能会使某些系统不稳定。
最大转矩电流比 (MTPA)
对于内置式 PMSM,转子磁路中的凸极导致  比率较高(大于 1)。这会在转子中产生磁阻转矩(除了现有电磁转矩之外)。有关详细信息,请参阅 MTPA Control Reference。
比率较高(大于 1)。这会在转子中产生磁阻转矩(除了现有电磁转矩之外)。有关详细信息,请参阅 MTPA Control Reference。
因此,您可以按 和 的最佳组合操作机器,并在相同的定子电流  下获得更高的转矩。
下获得更高的转矩。
这会提高机器的效率,因为此时定子电流损失最小。用于生成参考电流 和 以在机器中产生最大转矩的算法称为最大转矩电流比 (MTPA)。
对于内置式 PMSM (IPMSM),在达到基转速之前,此示例使用 MTPA 方法计算参考电流 和 。对于表贴式 PMSM (SPMSM),在达到基转速之前,该示例通过使用零 d 轴参考电流实现 MTPA 运行。
为了使电机以高于基转速的转速运行,此示例根据电机类型计算 MTPA 和弱磁控制的参考电流 和 。对于表贴式 PMSM,使用恒压恒功率 (CVCP) 控制方法。对于内置式 PMSM,使用电压和电流限制最大转矩 (VCLMT) 控制方法。
有关 MTPA Control Reference 模块的信息,请参阅 MTPA Control Reference。
目标通信
对于硬件实现,此示例使用主机模型和目标模型。主机模型运行在主机上,与部署在连接到电机的硬件上的目标模型进行通信。主机模型使用串行通信对目标模型发出指令,并以闭环控制方式运行电机。
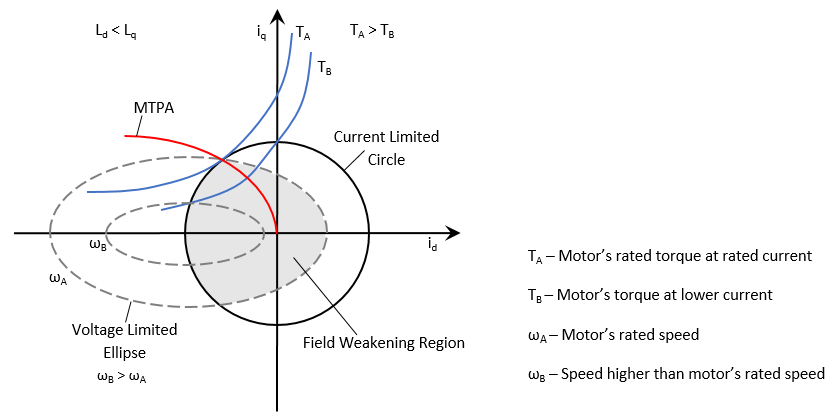
弱磁控制和 MTPA 都需要生成遵循以下各项限制的参考电流:
电流限制圆
电压限制椭圆
电机温度
要确定遵循这些限制的工作点,请参阅由函数 mcb.PMSMCharacteristics 生成的绘图。
在弱磁区域中,某些 PMSM 可能需要高于电机额定电流的定子电流。有关详细信息,请参阅由函数 mcb.PMSMCharacteristics 生成的绘图。
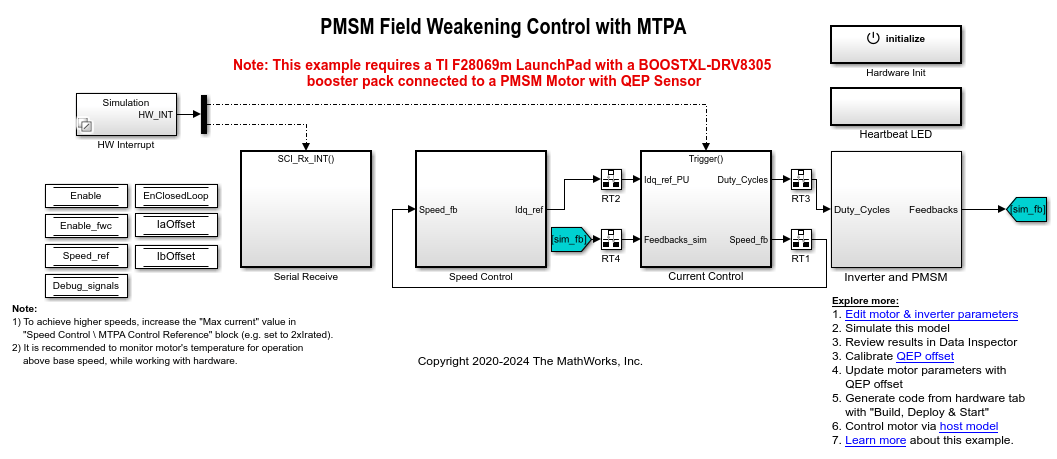
模型
此示例对以下硬件配置使用了多个模型:
带弱磁和 MTPA 的 PMSM 的转速控制:
mcb_pmsm_fwc_qep_f28069LaunchPad
mcb_pmsm_fwc_qep_f28379d
带弱磁和 MTPA 的内置式 PMSM (IPMSM) 的转速控制:
mcb_ipmsm_fwc_qep_f28379d
注意:此模型使用在模型初始化脚本中定义的 ADLEE-BM-180E IPMSM 参数。ADLEE-BM-180E IPMSM 的凸极率约为 10%( 大约比
大约比  高 10%)。鉴于凸极率较低,这种电机需要更高的 电流,才能进入弱磁区域并以高于额定转速的转速运行。然而,该电机的额定电流只有 9A。因此,当您在弱磁区域运行此电机时,较低的凸极率会使电机快速吸收高 电流(并快速达到额定电流限值),但只能在基转速的基础之上获得有限的转速增加。通过凸极率较高的 IPMSM,您可以使用此模型实现高于基转速的更高转速。
高 10%)。鉴于凸极率较低,这种电机需要更高的 电流,才能进入弱磁区域并以高于额定转速的转速运行。然而,该电机的额定电流只有 9A。因此,当您在弱磁区域运行此电机时,较低的凸极率会使电机快速吸收高 电流(并快速达到额定电流限值),但只能在基转速的基础之上获得有限的转速增加。通过凸极率较高的 IPMSM,您可以使用此模型实现高于基转速的更高转速。
带 MTPA 的 PMSM 的转矩控制:
mcb_pmsm_mtpa_qep_f28069LaunchPad
mcb_pmsm_mtpa_qep_f28379d
您可以将这些模型用于仿真和代码生成。
必需的 MathWorks 产品
要对模型进行仿真,您需要:
1.对于模型 mcb_pmsm_fwc_qep_f28069LaunchPad 和 mcb_pmsm_mtpa_qep_f28069LaunchPad:
Motor Control Blockset™
Fixed-Point Designer™
2.对于模型 mcb_pmsm_fwc_qep_f28379d、mcb_ipmsm_fwc_qep_f28379d 和 mcb_pmsm_mtpa_qep_f28379d
Motor Control Blockset™
要生成代码并部署模型,您需要:
1.对于模型 mcb_pmsm_fwc_qep_f28069LaunchPad 和 mcb_pmsm_mtpa_qep_f28069LaunchPad:
Motor Control Blockset™
Embedded Coder®
C2000™ Microcontroller Blockset
Fixed-Point Designer™
2.对于模型 mcb_pmsm_fwc_qep_f28379d、mcb_ipmsm_fwc_qep_f28379d 和 mcb_pmsm_mtpa_qep_f28379d
Motor Control Blockset™
Embedded Coder®
C2000™ Microcontroller Blockset
Fixed-Point Designer™(仅在优化代码生成时需要)
前提条件
1.获取电机参数。我们对 Simulink® 模型提供了默认电机参数,您可以用电机数据表或其他来源的值替换这些默认值。
不过,如果您有电机控制硬件,则可以通过使用 Motor Control Blockset 参数估计工具来估计要使用的电机的参数。有关说明,请参阅使用 Motor Control Blockset 参数估计工具估计电机参数。
参数估计工具使用估计的电机参数更新 motorParam 变量(在 MATLAB® 工作区中)。
2.如果您从数据表或其他来源获得电机参数,请在与 Simulink® 模型相关联的模型初始化脚本中更新电机、逆变器和位置传感器校准参数。有关说明,请参阅估计控制增益并调节控制参数。
如果您使用参数估计工具,则可以在模型初始化脚本中更新逆变器和位置传感器校准参数,但不能更新电机参数。该脚本会自动从更新后的 motorParam 工作区变量中提取电机参数。
仿真(转速控制和转矩控制)模型
此示例支持仿真。请按照以下步骤仿真模型。
1.打开此示例附带的一个模型。
2.点击仿真选项卡上的运行来仿真该模型。
3.点击仿真选项卡上的数据检查器来查看和分析仿真结果。
分析转速控制模型的仿真结果
该模型使用标幺制来表示转速、电流、电压、转矩和功率。在工作区中键入 PU_System,可查看将这些量的一个标幺值转换为国际单位的结果。
观测转速和电流控制器的系统动态特性。另请注意电机以高于基转速的转速运行时的负 Id 电流。
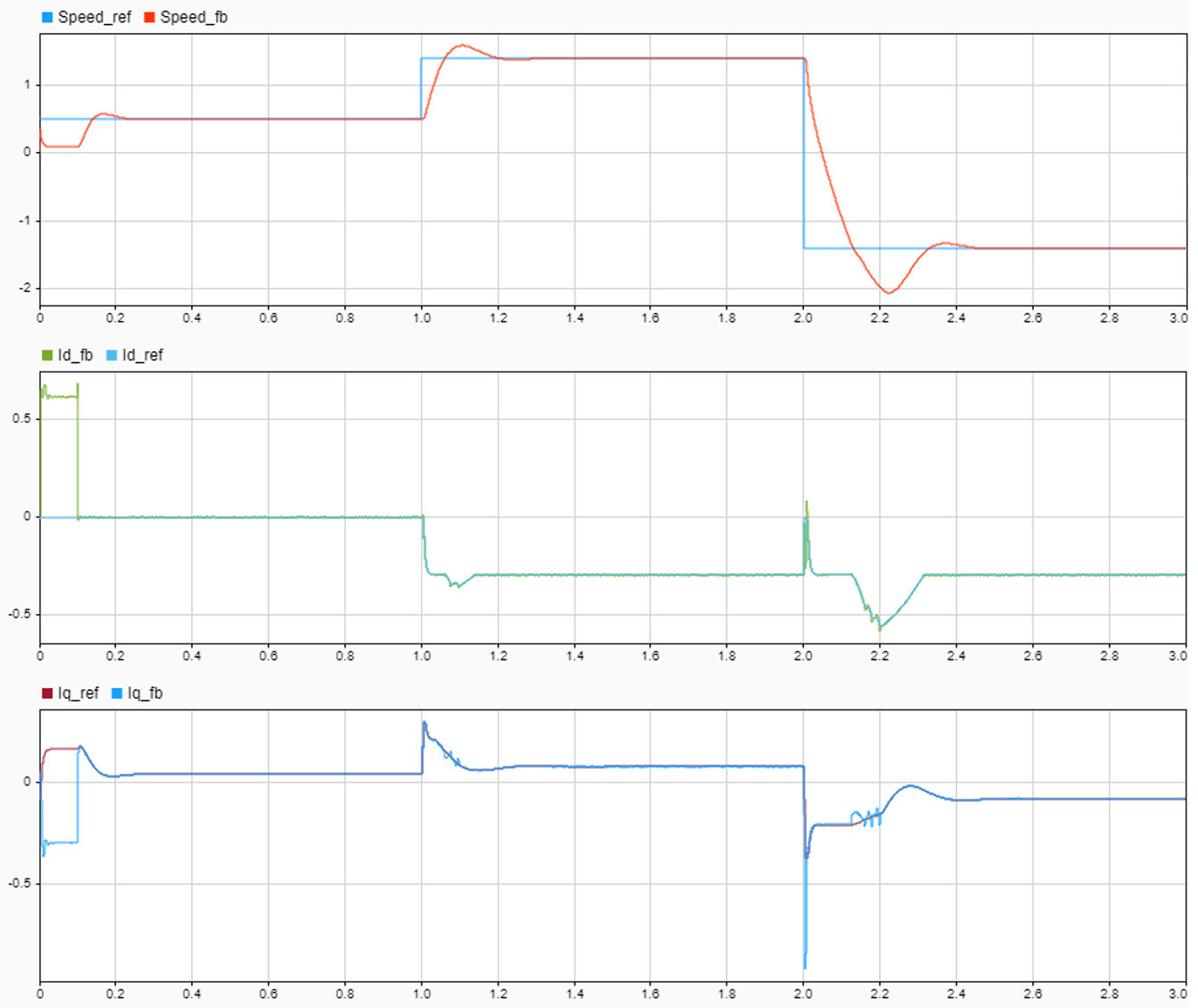
注意:在开始时,该示例以开环控制方式运行电机。在检测到正交编码器的索引脉冲后,电机开始以闭环控制方式运行。启动算法大约需要 0.5 秒来执行此转换。忽略在此初始阶段观测到的转速和位置反馈信号的任何瞬变。
分析转矩控制模型的仿真结果
使用由以下三种方法生成的 Id 和 Iq 参考电流运行仿真:
1.使用 MTPA Control Reference 模块生成参考电流。
2.使用 Vector Control Reference 模块手动生成 MTPA 参考电流。
3.在不使用 MTPA 的情况下生成控制参考电流。
第一种方法在假定线性电感的情况下运用数学计算来确定参考电流 Id 和 Iq。
第二种方法可用来为具有非线性电感的电机手动生成 MTPA 查找表。您可以用通过在 +(π/2) 到 -(π/2) 之间扫描转矩角生成的 Id 和 Iq 参考值来说明此方法。
使用最后一种方法,无需 MTPA 算法即可获得参考电流。
您可以在数据检查器中比较由这三种方法生成的转矩和功率。
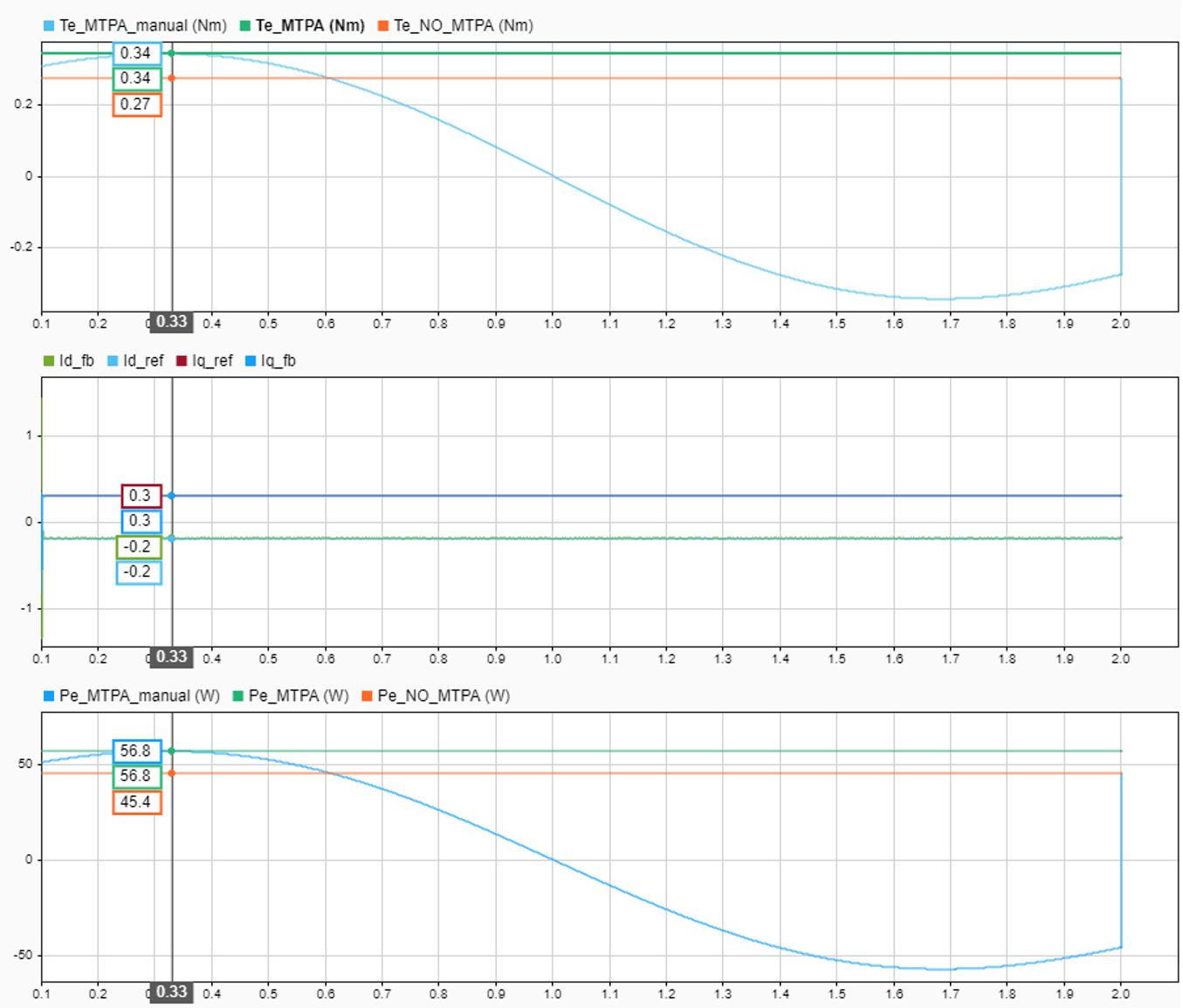
在前面的示例中,您可能注意到,使用 MTPA 生成的电转矩是 0.34PU,而在不使用 MTPA 的情况下生成的电转矩是 0.27PU。您可能还注意到,随着转矩角的变化,产生的最大转矩与使用 MTPA 产生的转矩匹配。d 轴电流为负表明 MTPA 利用了内置式 PMSM 的磁阻转矩。
注意:如果使用的是表贴式 PMSM,请在以下位置处的 MTPA Control Reference 模块中,将电机参数的类型从内置式 PMSM 改为表贴式 PMSM:
mcb_pmsm_fwc_qep_f28069LaunchPad/Speed Control
mcb_pmsm_fwc_qep_f28379d/Speed Control
mcb_pmsm_mtpa_qep_f28069LaunchPad/Torque Control/MTPA_Reference
mcb_pmsm_mtpa_qep_f28379d/Torque Control/MTPA_Reference
生成代码并将模型部署到目标硬件
本节将指导您生成代码并在目标硬件上运行 FOC 算法。
此示例使用一个主机模型和一个目标模型。主机模型是控制器硬件板的一个用户界面。您可以在主机上运行主机模型。使用主机模型的前提条件是将目标模型部署到控制器硬件板上。主机模型使用串行通信对目标 Simulink® 模型发出指令,并以闭环控制方式运行电机。
必需的硬件
此示例支持以下硬件配置。您还可以在 MATLAB® 命令提示符下使用目标模型名称打开对应硬件配置的模型。
LAUNCHXL-F28069M 控制器 + BOOSTXL-DRV8305 逆变器:
mcb_pmsm_fwc_qep_f28069LaunchPad和mcb_pmsm_mtpa_qep_f28069LaunchPad
LAUNCHXL-F28379D 控制器 + BOOSTXL-DRV8305 逆变器:
mcb_pmsm_fwc_qep_f28379d、mcb_ipmsm_fwc_qep_f28379d和mcb_pmsm_mtpa_qep_f28379d
有关与前述硬件配置相关的连接,请参阅 LAUNCHXL-F28069M 和 LAUNCHXL-F28379D 配置。
运行模型,以通过弱磁和 MTPA 实现转速和转矩控制
1.按照上一节操作来仿真模型并分析仿真结果。
2.完成硬件连接。
3.转矩控制模型需要带 QEP 传感器的内置式 PMSM,由带转速控制的外部测功机(使用转速控制模型)驱动。
4.该模型自动计算 ADC(或电流)偏移值。要禁用此功能(默认启用),请在模型初始化脚本中将值 0 更新为变量 inverter.ADCOffsetCalibEnable。
您也可以计算 ADC 偏移值,并在模型初始化脚本中手动更新它。有关说明,请参阅以开环控制方式运行三相 AC 电机并校准 ADC 偏移量。
5.计算正交编码器索引偏移值,并在与目标模型相关联的模型初始化脚本中更新它。有关说明,请参阅 PMSM 的正交编码器偏移量校准。
6.按所需的硬件配置打开目标模型。如果您要更改目标模型的默认硬件配置设置,请参阅模型配置参数。
7.将一个示例程序加载到 LAUNCHXL-F28379D 的 CPU2(例如使用 GPIO31 操作 CPU2 蓝色 LED 的程序 c28379D_cpu2_blink.slx),以确保 CPU2 没有错误地配置为使用预留给 CPU1 的板载外设。有关示例程序或模型的详细信息,请参阅 Texas Instruments入门指南 C2000 Microcontroller Blockset (C2000 Microcontroller Blockset) 中的“任务 2 - 为 TI Delfino F28379D LaunchPad(双核)创建、配置和运行模型”部分。
8.点击硬件选项卡上的编译、部署和启动以将目标模型部署到硬件上。
9.点击目标模型中的 mcb_pmsm_fwc_host_model.slx 主机模型超链接以打开关联的主机模型。
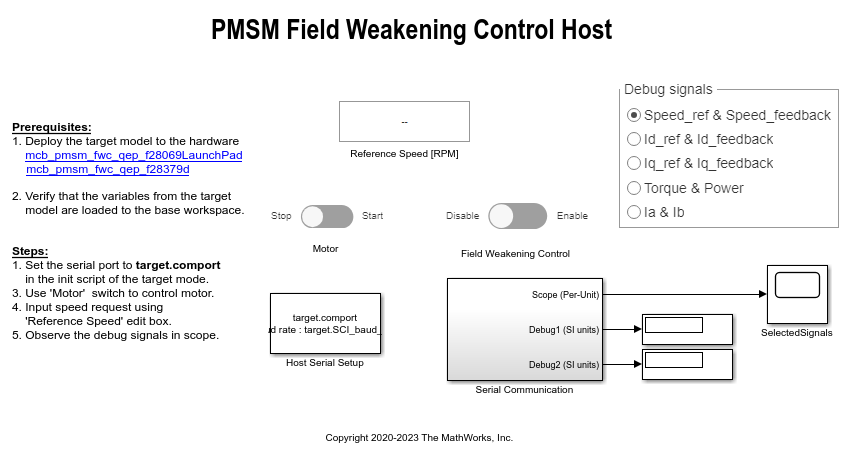
有关主机模型和目标模型之间串行通信的详细信息,请参阅Host-Target Communication。
10.在与目标模型关联的模型初始化脚本中,使用变量 target.comport 指定通信端口。该示例使用此变量来更新主机模型中可用的 Host Serial Setup、Host Serial Receive 和 Host Serial Transmit 模块的端口参数。
11.在转速控制模型中,更新 Reference Speed (RPM) 模块值。在转矩控制模型中,使用 Imag Reference 模块更新当前请求。
12.点击仿真选项卡上的运行以运行主机模型。
13.将 Start / Stop Motor 开关的位置切换到 On 以开始运行电机。
14.在主机模型的 Time Scope 内,输入不同参考转速(或电流)并观测来自 RX 子系统的调试信号。
注意:
如果位置偏移量不正确,此示例可能会导致电机电流过大。为了避免这种情况,请确保正确计算了位置偏移量,并在工作区变量 pmsm.PositionOffset 中更新了它。
当电机以高于基转速的转速运行时,我们建议您监控电机的温度。在电机运行期间,如果电机温度升高,超出制造商建议的温度,出于安全原因,请关闭电机。
当电机以高于基转速的转速运行时,我们建议您以小步长增大转速参考值,以避免弱磁所带来的动态变化,这可能会使某些系统不稳定。
参考资料
[1] B. Bose, Modern Power Electronics and AC Drives.Prentice Hall, 2001.ISBN-0-13-016743-6.
[2] Lorenz, Robert D., Thomas Lipo, and Donald W. Novotny."Motion control with induction motors."Proceedings of the IEEE, Vol. 82, Issue 8, August 1994, pp. 1215-1240.
[3] Morimoto, Shigeo, Masayuka Sanada, and Yoji Takeda."Wide-speed operation of interior permanent magnet synchronous motors with high-performance current regulator."IEEE Transactions on Industry Applications, Vol. 30, Issue 4, July/August 1994, pp. 920-926.
[4] Li, Muyang."Flux-Weakening Control for Permanent-Magnet Synchronous Motors Based on Z-Source Inverters."Master's Thesis, Marquette University, e-Publications@Marquette, Fall 2014.
[5] Briz, Fernando, Michael W. Degner, and Robert D. Lorenz."Analysis and design of current regulators using complex vectors."IEEE Transactions on Industry Applications, Vol. 36, Issue 3, May/June 2000, pp. 817-825.
[6] Briz, Fernando, et al."Current and flux regulation in field-weakening operation [of induction motors]."IEEE Transactions on Industry Applications, Vol. 37, Issue 1, Jan/Feb 2001, pp. 42-50.
[7] TI Application Note, "Sensorless-FOC With Flux-Weakening and MTPA for IPMSM Motor Drives."