Quadrature Decoder
计算正交编码器的位置
库:
Motor Control Blockset /
Sensor Decoders
Motor Control Blockset HDL Support /
Sensor Decoders
描述
Quadrature Decoder 模块用于计算正交编码器的位置。
在计算正交编码器(和转子)的角位置(以度、弧度或标幺为单位)时,该模块会使用以下方法之一。
当前编码器计数值和前一个索引脉冲(如果索引脉冲可用)时编码器计数值之间的差值。
当前编码器计数器值(索引脉冲不可用时)。
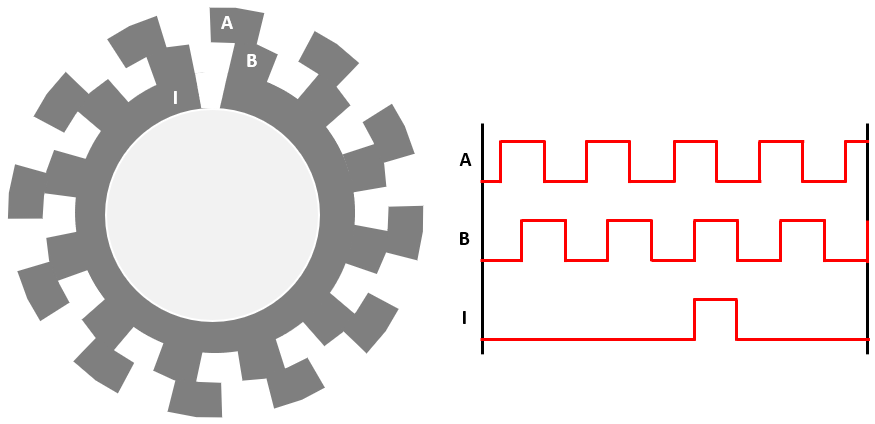
下图显示了具有两个通道(QEPA 和 QEPB)和一个索引脉冲 (QEPI) 的正交编码器盘:
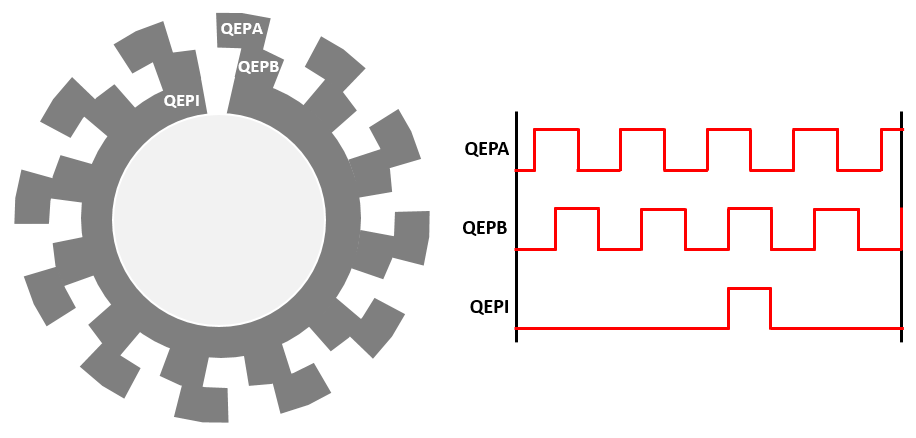
在此示例中,每通过编码器盘上的一个刻度线时,由 QEP 驱动的计时器数值会增加 4:
方程
该模块使用 Cnt 和 Idx 模块输入来计算正交编码器的角位置(以计数为单位):
当 Cnt ≥ Idx 时:
当 Cnt < Idx 时:
当 Cnt(无符号整数)超出所选计数器大小的最大值时,该模块会在内部添加必要的补偿。
当您清除外部索引计数复选框时,只有 Cnt 输入可用,因此:
其中:
是正交编码器的角位置,以计数为单位。
是正交编码器的一个旋转周期中的计数 (Counts per revolution = Encoder slits ⨯ Encoder counts per slit)。
该模块将输出 θm 计算为:
其中,MaxPosition = 360(度)或 2π(弧度)或 1(标幺),具体取决于所选的位置单位参数值。
示例
Simulate Calculation of Rotor Position Using Quadrature Decoder Block
Use the quadrature decoder block to simulate estimation of rotor position.
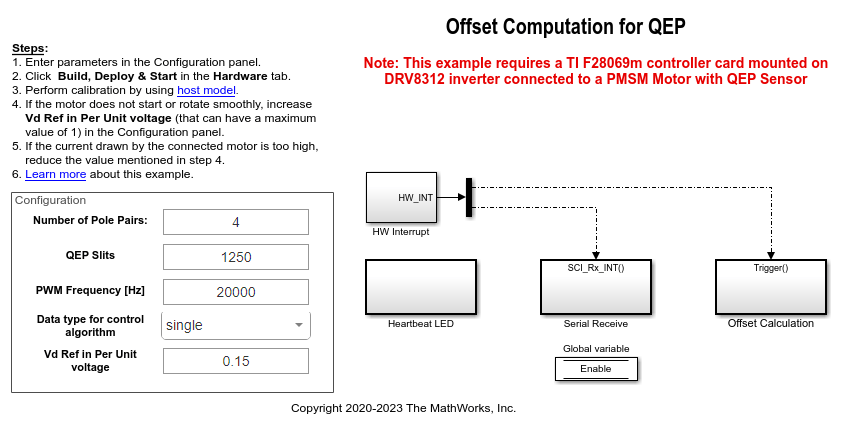
PMSM 的正交编码器偏移量校准
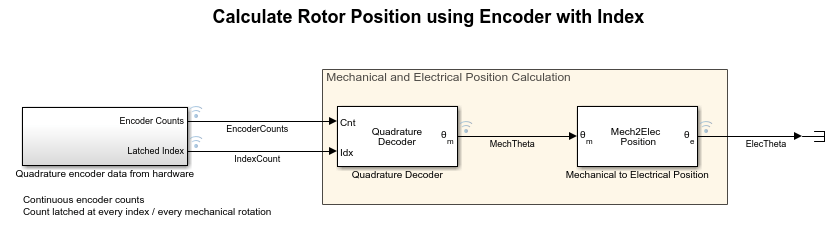
此示例计算转子的 d 轴与正交编码器检测到的编码器索引脉冲位置之间的偏移量。控制算法(在磁场定向控制和参数估计示例中可用)使用此偏移值来计算转子的 d 轴的精确位置。控制器需要此位置以在转子磁通参考系(d-q 参考系)中正确实现磁场定向控制 (FOC),从而正确运行永磁同步电机 (PMSM)。
使用正交编码器的 PMSM 磁场定向控制
此示例采用磁场定向控制 (FOC) 方法来控制三相永磁同步电机 (PMSM) 的转速。FOC 算法需要转子位置反馈,该反馈通过正交编码器获得。有关 FOC 的详细信息,请参阅磁场定向控制。
端口
输入
输出
参数
扩展功能
版本历史记录
在 R2020a 中推出