Sliding Mode Observer
库:
Motor Control Blockset /
Sensorless Estimators
描述
Sliding Mode Observer 模块通过使用静止 αβ 参考系的 α 轴与 β 轴上的电压和电流值来计算 Surface Mount PMSM 的电气位置和机械转速。
方程
以下方程描述 PMSM 的离散时间操作:
以下方程描述表贴式 PMSM 的离散时间滑动模式观测器操作:
如果反电动势观测器满足条件 和 ,则存在一个 k0,使得:
如果滑动模式观测器满足以下条件:
则存在一个 k=k0,使得当 k≥k0 时:
其中:
eα 和 iα 是 α 轴的定子反电动势和电流。
eβ 和 iβ 是 β 轴的定子反电动势和电流。
ẽα 和 ĩα 是 α 轴的定子反电动势和电流误差。
ẽβ 和 ĩβ 是 β 轴的定子反电动势和电流误差。
vα 和 vβ 是定子电源电压。
R 是定子电阻。
L 是定子电感。
g 是反电动势观测器增益。
。η 是电流观测器增益。
ωe 是电角速度。
Ts 是采样周期。
k 是采样计数。
调节滑动模式观测器
执行以下步骤,使用电流观测器增益 (η) 和反电动势观测器增益 (g) 参数来调节模块。
选择反电动势观测器增益 (g) 值,使得 。使 g 接近值
1会减少估计的反电动势的误差。然而,这会使得收敛变慢。根据模块采样时间和工作反电动势的最大斜率选择值 m(使得 )。
基于 b、m 和 g 选择当前观测器增益 (η) 值(使得 )。
注意
当您调节滑动模式观测器增益时,模块将正常工作。
当使用开环控制运行电机时,请同时使用滑动模式观测器和实际传感器硬件计算转子位置,并比较计算的位置值。如果差异在可接受范围内,则模块将正常工作。否则,请手动调节滑动模式观测器增益以确保模块准确运行。
由于电流和电压中的噪声,从开环控制到闭环控制的转换可能会失败。要成功转换,请尝试减小滤波器截止频率(Hz) 参数的值。
示例
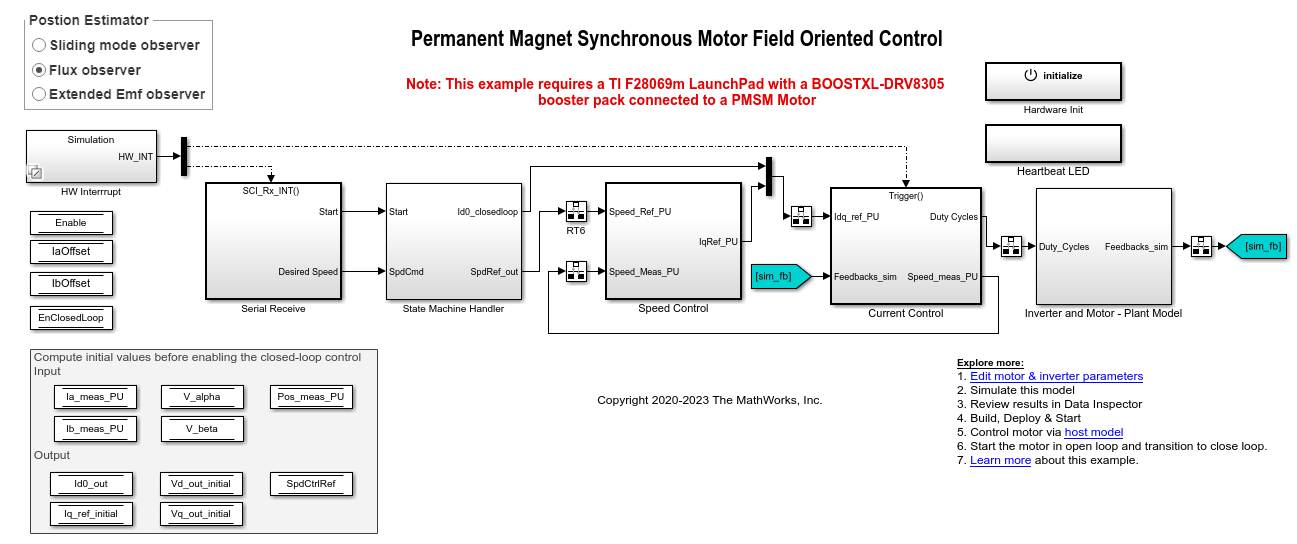
PMSM 的无传感器磁场定向控制
此示例采用磁场定向控制 (FOC) 方法来控制三相永磁同步电机 (PMSM) 的转速。有关 FOC 的详细信息,请参阅磁场定向控制。
端口
输入
输出
参数
参考
[1] A. Podder and D. Pandit, "Study of Sensorless Field-Oriented Control of SPMSM Using Rotor Flux Observer & Disturbance Observer Based Discrete Sliding Mode Observer," 2021 IEEE 22nd Workshop on Control and Modelling of Power Electronics (COMPEL), 2021, pp. 1-8. (doi: 10.1109/COMPEL52922.2021.9645939)
[2] T. Bernardes, V. F. Montagner, H. A. Gründling, and H. Pinheiro, "Discrete-Time Sliding Mode Observer for Sensorless Vector Control of Permanent Magnet Synchronous Machine," in IEEE Transactions on Industrial Electronics, vol. 61, no. 4, pp. 1679-1691, 2014
[3] B. Bose, Modern Power Electronics and AC Drives. Prentice Hall, 2001. ISBN-0-13-016743-6.
[4] J. Liu and X. Wan, "Advanced Sliding Mode Control for Mechanical Systems". Springer-Verlag Berlin Heidelberg, 2011.
扩展功能
版本历史记录
在 R2021b 中推出