Flux Observer
计算转子的电气位置、磁通量和电转矩
库:
Motor Control Blockset HDL Support /
Sensorless Estimators
Motor Control Blockset /
Sensorless Estimators
描述
Flux Observer 模块使用静止 αβ 参考系中沿 α- 轴和 β 轴的标幺单位电压和电流值,计算表贴式永磁同步电机 (SPMSM) 或感应电机的电气位置、磁通量和电转矩。
该模块还接受 16 位定点数据类型输入。为了对 16 位定点数据类型信号执行数学运算,该模块使用优化的方程实现来保持最佳精度。
此外,您还可以使用高级选项来启用 ParameterBus 输入端口,该端口可与 Compute Parameter 模块结合使用,以便在运行时以最佳方式更新模块参数。当电机参数可能随时间变化时(例如,构建可能需要在运行时更换电机的应用时),您可以使用此功能。
方程
以下方程描述模块如何在 αβ 参考系中计算 SPMSM 的电气位置、磁通量和电转矩。
如果 且
则以下拉普拉斯变换表示在 Ψα 和 Ψβ 中可用的积分项:
该模块使用基于低通滤波器 (LPF) 的积分器来计算这些积分项。
如果电机的输入电角速度 (ωe) 远大于对应于基于 LPF 的积分器的截止频率的速度 (ωc),则
基于 LPF 的积分器不允许任何 DC 偏移(在模块输入中)使模块输出逐渐增加。例如,假设有一个与阶跃输入 x(t) = k*u(t) 对应的输入函数 X(s)=k/s。使用基于 LPF 的积分器的前述传递函数 ,我们得到:
根据上一方程,LPF 积分器的阶跃响应会渐近稳定于 DC 值(取决于阶跃输入的幅值)。而纯积分器的阶跃响应是斜坡函数。在 LPF 积分器输出端使用高通滤波器可以完全消除输入中的 DC 偏移。
下列方程描述该模块如何计算感应电机的转子电气位置、转子磁通量和电转矩。
其中:
和 是 α 轴和 β 轴电压(伏特)。
和 是 α 轴和 β 轴电流(安培)。
是电机的定子电阻 (ohm)。
是电机的定子电感(亨)。
是电机的转子电感(亨)。
是电机的磁化电感(亨)。
是感应电机的总漏磁因子。
是电机极对数。
是转子磁通量(韦伯)。
和 是沿 α 轴和 β 轴的转子磁通量(韦伯)。
是转子的电转矩 (Nm)。
是转子的电气位置(弧度)。
示例
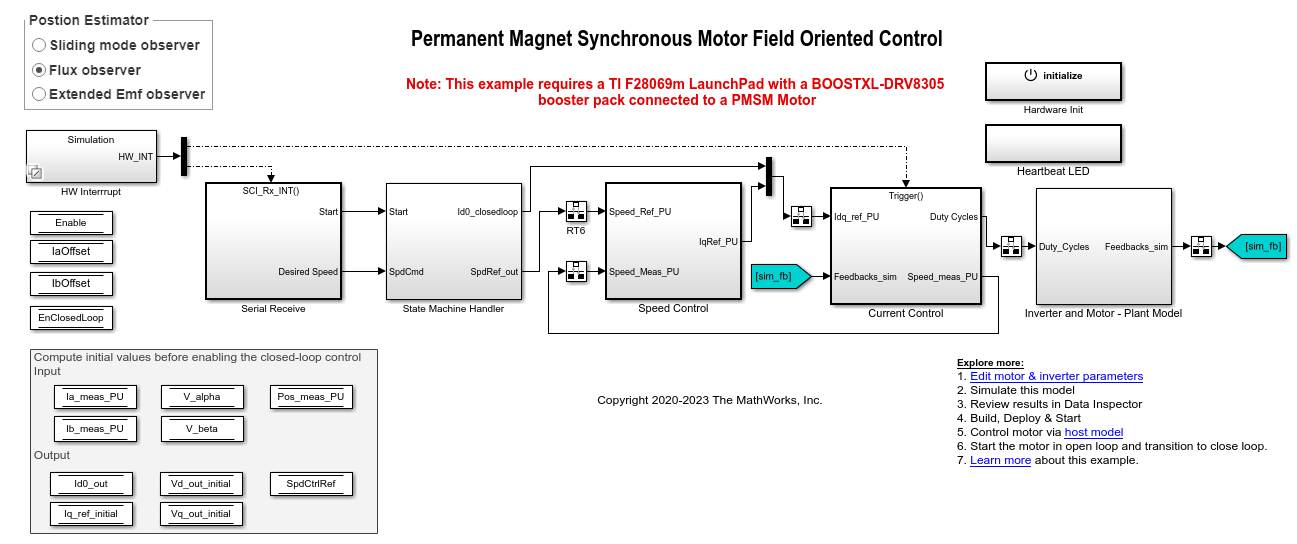
PMSM 的无传感器磁场定向控制
此示例采用磁场定向控制 (FOC) 方法来控制三相永磁同步电机 (PMSM) 的转速。有关 FOC 的详细信息,请参阅磁场定向控制。
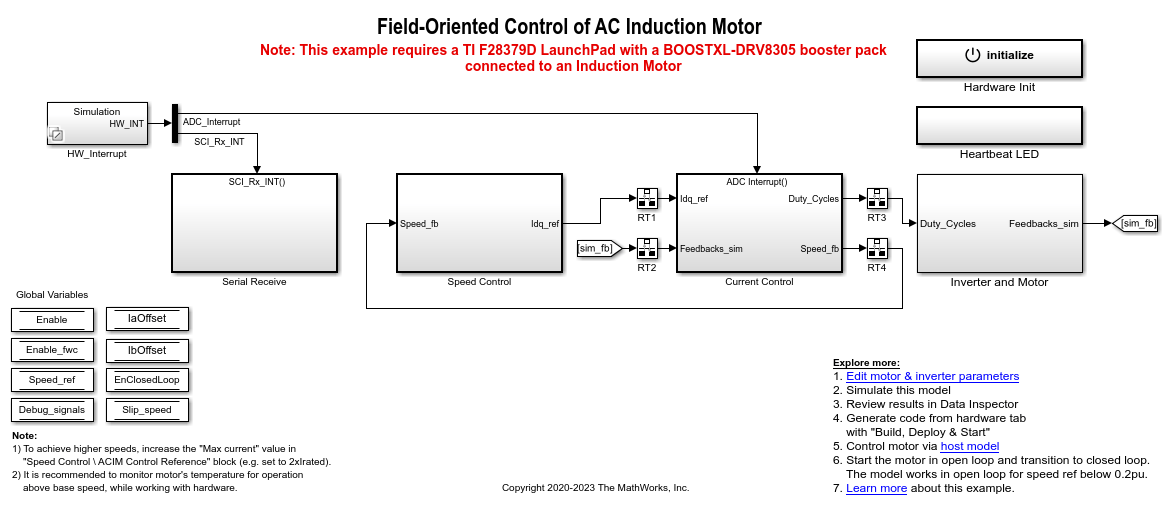
感应电机的无传感器磁场定向控制
此示例使用无传感器位置估计来实现磁场定向控制 (FOC) 方法,以控制三相 AC 感应电机 (ACIM) 的转速。有关 FOC 的详细信息,请参阅磁场定向控制。
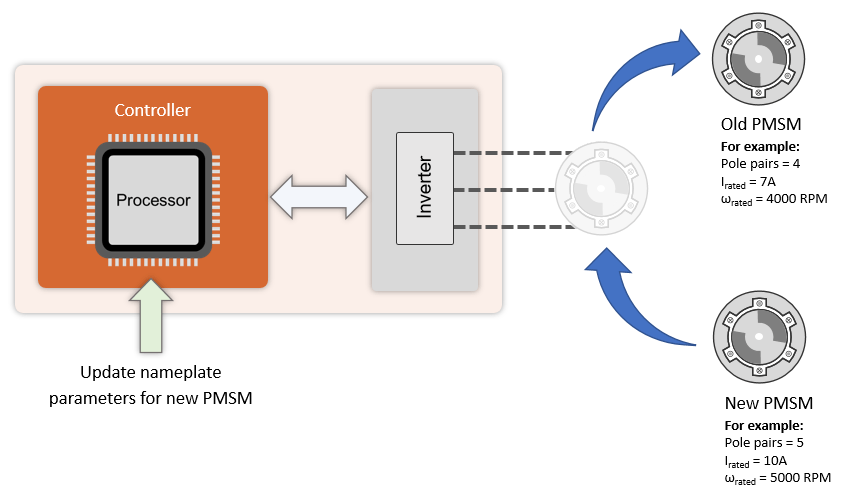
Swap Motors with Single Deployment of Sensorless FOC Algorithm
Run a permanent magnet synchronous motor (PMSM) in an industrial drive application setup using a sensorless field-oriented control (FOC) algorithm. The example uses a sensorless Flux Observer to estimate the motor position. Industrial drives enable you to replace a motor with a new one without repeated deployment of code. An industrial drive setup needs only nameplate parameters to adapt the software to the new motor.
端口
输入
输出
参数
参考
[1] A. Podder and D. Pandit, "Study of Sensorless Field-Oriented Control of SPMSM Using Rotor Flux Observer & Disturbance Observer Based Discrete Sliding Mode Observer," 2021 IEEE 22nd Workshop on Control and Modelling of Power Electronics (COMPEL), 2021, pp. 1-8. (doi: 10.1109/COMPEL52922.2021.9645939)
[2] O. Sandre-Hernandez, J. J. Rangel-Magdaleno and R. Morales-Caporal, "Simulink-HDL cosimulation of direct torque control of a PM synchronous machine based FPGA," 2014 11th International Conference on Electrical Engineering, Computing Science and Automatic Control (CCE), Campeche, 2014, pp. 1-6. (doi: 10.1109/ICEEE.2014.6978298)
[3] Y. Inoue, S. Morimoto and M. Sanada, "Control method suitable for direct torque control based motor drive system satisfying voltage and current limitations," The 2010 International Power Electronics Conference - ECCE ASIA -, Sapporo, 2010, pp. 3000-3006. (doi: 10.1109/IPEC.2010.5543698)
扩展功能
版本历史记录
在 R2020a 中推出