Inverse Park Transform
实现 dq 到 αβ 的变换
库:
Motor Control Blockset /
Controls /
Math Transforms
Motor Control Blockset HDL Support /
Controls /
Math Transforms
描述
Inverse Park Transform 模块计算正交直轴 (d) 和正交轴 (q) 分量或旋转 dq 参考系中的多路复用 dq0 分量的帕克逆变换。
您可以对该模块进行配置,使 d 轴或 q 轴在时间 t = 0 处与 α 轴对齐。
该模块接受以下输入:
旋转参考系中的 d-q 轴分量或多路复用分量 dq0。使用输入数目参数以使用两个或三个输入。
对应变换角度的正弦值和余弦值。
在使用双输入配置时,它输出静止 αβ 参考系中的两相正交分量。在使用三输入配置时,它输出多路复用分量 αβ0。
对于平衡系统,零分量等于零。
下列各图显示在以下情形下的旋转 dq 参考系和 αβ 参考系中的 α-β 轴分量:
d 轴与 α 轴对齐。

q 轴与 α 轴对齐。
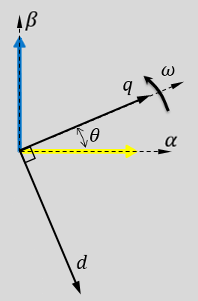
在这两种情形下,角度 θ = ωt,其中:
θ 是 d 轴对齐时 α 轴和 d 轴之间的夹角,或是 q 轴对齐时 α 轴和 q 轴之间的夹角。它指示旋转 dq 参考系相对于 α 轴的角位置。
ω 是 d-q 参考系的转速。
t 是从初始对齐开始的时间,以秒为单位。
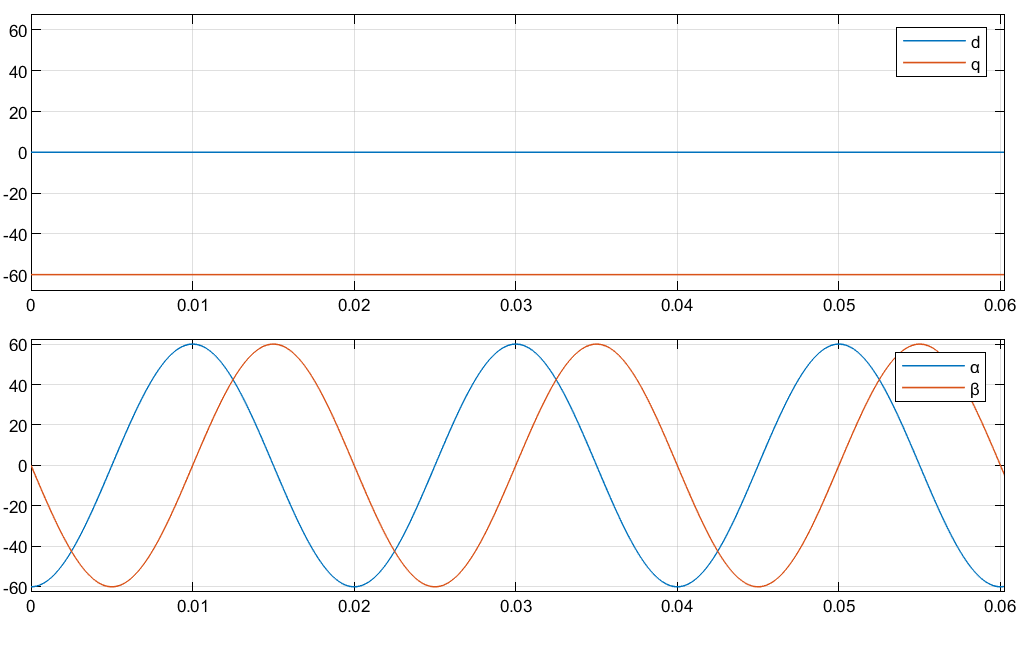
下列各图显示 αβ 和 dq 参考系的各个分量在以下情形的时间响应:
d 轴与 α 轴对齐。

q 轴与 α 轴对齐。
方程
以下方程描述了该模块如何实现帕克逆变换。
当 d 轴与 α 轴对齐时。
当 q 轴与 α 轴对齐时。
其中:
和 是旋转 dq 参考系中的直轴和交轴正交分量。
和 是静止 αβ 参考系中的两相正交分量。
如果将输入数目参数设置为三输入,则以下方程描述该模块如何实现帕克逆变换:
Inverse Park 模块实现 a 相到 q 轴对齐的变换,如下所示
其中:
d 和 q 是旋转参考系中双轴系统的直轴和交轴分量。
0 是零分量。
α 和 β 是静止参考系中两相系统的 alpha 轴和 beta 轴分量。
对于 a 相到 d 轴的对齐,该模块使用以下方程实现变换:
示例
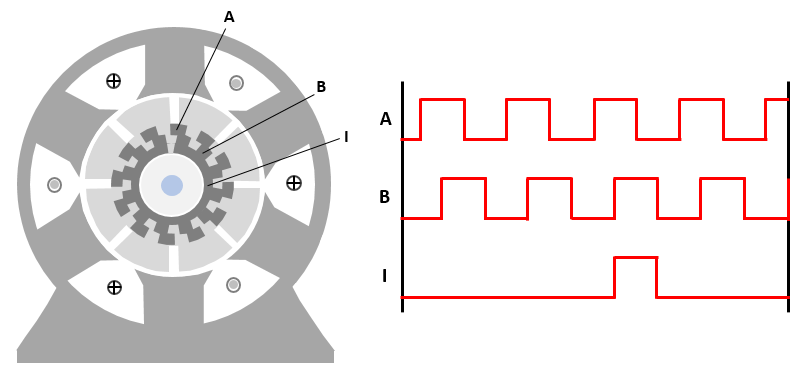
使用转速传感器实现感应电机的磁场定向控制
此示例采用磁场定向控制 (FOC) 方法来控制三相 AC 感应电机 (ACIM) 的转速。FOC 算法需要转子转速反馈,在此示例中通过使用正交编码器获得此反馈。有关 FOC 的详细信息,请参阅磁场定向控制。

PMSM 的弱磁控制(使用 MTPA)
此示例采用磁场定向控制 (FOC) 方法来控制三相永磁同步电机 (PMSM) 的转矩和转速。FOC 算法需要转子位置反馈,该反馈通过正交编码器获得。有关 FOC 的详细信息,请参阅磁场定向控制。

使用霍尔传感器的 PMSM 的磁场定向控制
此示例采用磁场定向控制 (FOC) 方法来控制三相永磁同步电机 (PMSM) 的转速。FOC 算法需要转子位置反馈,通过使用霍尔传感器获得该反馈。有关 FOC 的详细信息,请参阅磁场定向控制。
端口
输入
输出
参数
扩展功能
版本历史记录
在 R2020a 中推出