VbyF Controller
Libraries:
Motor Control Blockset /
Controls /
Controllers
Description
The VbyF Controller block implements V/F (open-loop or scalar) control for a three-phase permanent magnet synchronous motor (PMSM) or an AC induction motor (ACIM).
You can specify reference speed, motor rated speed, number of motor pole pairs, motor rated voltage, minimum block output voltage, as well as number of discrete time steps for initial ramp up as inputs to compute the three-phase voltages that drive the motor.
When you start up the motor, the block uses the NRamp input to identify the number of block samples that it needs to gradually ramp up the motor speed to the reference speed.
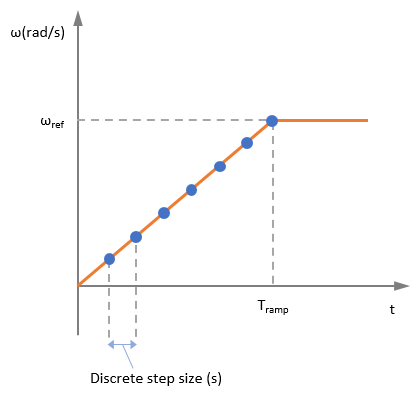
The block's output voltage amplitude varies according to the reference motor speed (ωref), while keeping the ratio of rated voltage to rated frequency constant.
where:
Vabc_amplitude is the amplitude of the output voltage Vabc.
Vrated is the amplitude of rated phase voltage of the motor.
frated is the rated frequency of the motor.
fref is the reference frequency of the motor.
ωrated is the rated speed of the motor.
ωref is the reference speed of the motor.
The V/F control technique does not require any feedback from the motor. This control technique ensures a constant stator magnetic flux by keeping the motor phase voltage proportional to its frequency. For more information about this technique, see Open-Loop Motor Control.
Note
It is recommended that you use this block to start the motor and run it at lower speeds and then switch to other control methods, such as field-oriented control (FOC), to operate the motor at higher speeds.
If you specify 16-bit fixed-point inputs, the block might not produce an accurate output due to insufficient resolution.
Examples
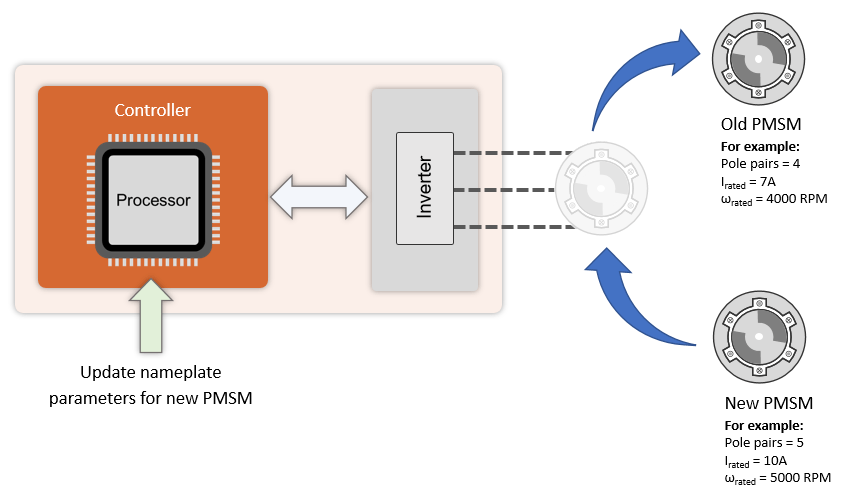
Swap Motors with Single Model Deployment of Sensor-Based FOC Algorithm
Run a permanent magnet synchronous motor (PMSM) in an industrial drive application setup using position-sensor-based field-oriented control (FOC). Industrial drives enable you to swap motors in real-time without repeated deployment of code. An industrial drive setup needs a fixed inverter and software that has the ability to adapt the control algorithm according to the new motor using only the updated nameplate parameters.
Swap Motors with Single Deployment of Sensorless FOC Algorithm
Run a permanent magnet synchronous motor (PMSM) in an industrial drive application setup using a sensorless field-oriented control (FOC) algorithm. The example uses a sensorless Flux Observer to estimate the motor position. Industrial drives enable you to replace a motor with a new one without repeated deployment of code. An industrial drive setup needs only nameplate parameters to adapt the software to the new motor.
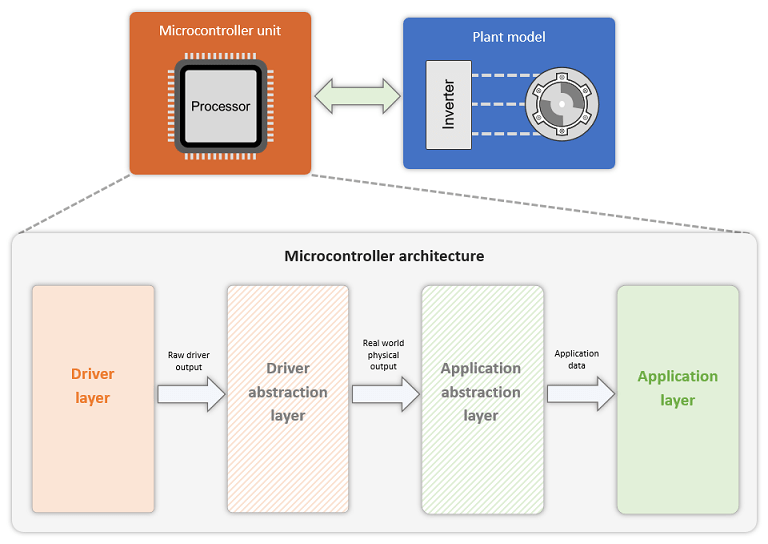
Generate Motor Control Models for Selected Algorithm and Hardware
Use Motor Control Blockset™ to generate a Simulink® model that is configured for a specific hardware and motor control technique.
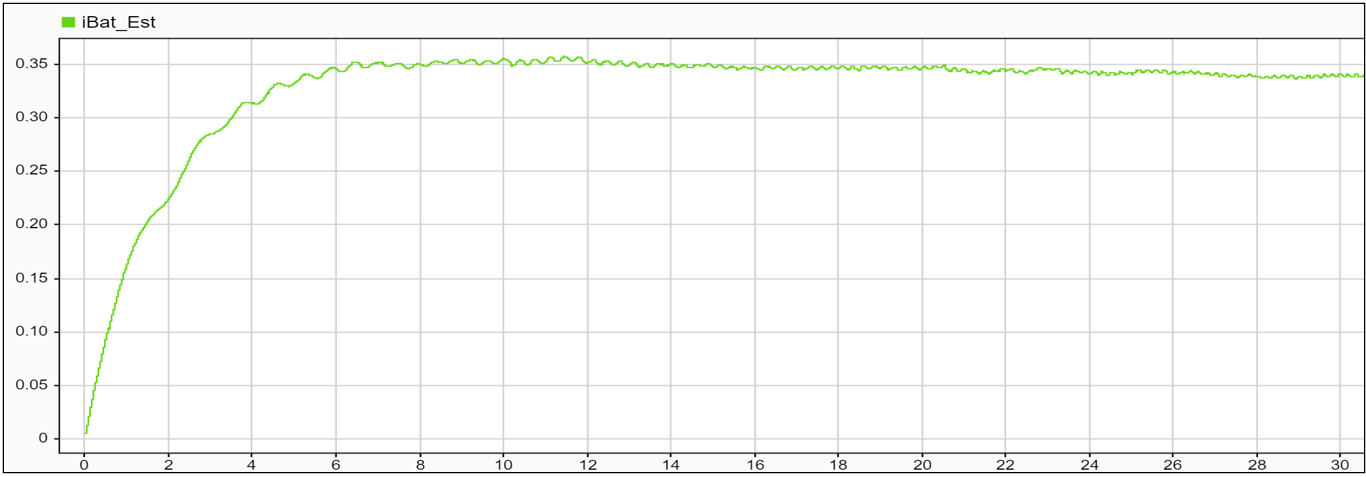
Estimate Battery Current of PMSM in Open-Loop Control Using Arduino Hardware
Use Simulink® Support Package for Arduino® Hardware to estimate the battery current of a permanent magnet synchronous machine (PMSM) in open-loop control using Motor Control Blockset™. This example also shows how to actuate a PMSM motor and calculate phase currents that are indirectly used to estimate the current of the battery.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2023b