Hall Speed and Position
使用霍尔传感器计算转子转速和估计转子位置
库:
Motor Control Blockset /
Sensor Decoders
描述
Hall Speed and Position 模块通过跟踪霍尔状态的变化来计算转子的机械转速。该模块还通过使用方向、霍尔状态和外部计数器值输入来估计转子的电气位置。
该模块在控制器算法定义的固定时间间隔后周期性地执行。
示例

How to Use Hall Validity and Hall Speed and Position Blocks
Integrate Hall Validity and Hall Decoder blocks with field-oriented control (FOC) algorithm.
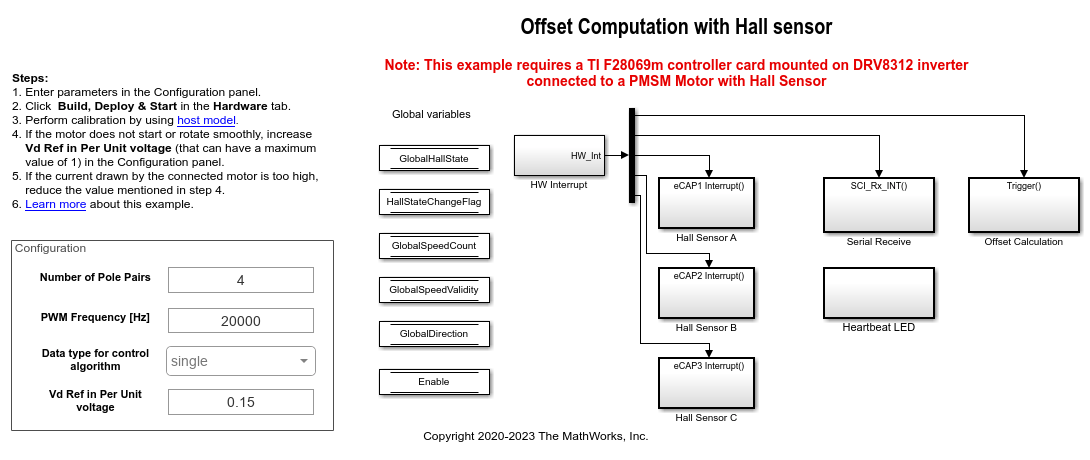
PMSM 的霍尔偏移量校准
此示例计算转子直轴(d 轴)和霍尔传感器检测到的位置之间的偏移量。磁场定向控制 (FOC) 算法需要此位置偏移量来正确运行永磁同步电机 (PMSM)。为了计算偏移量,目标模型在开环条件下运行电机。该模型使用常量 (沿定子
d 轴的电压)和零值 (沿定子
q 轴的电压),通过使用位置或斜坡发生器来运行电机(以低恒定转速)。当位置或斜坡值达到零时,对应的转子位置就是霍尔传感器的偏移值。

使用霍尔传感器的 PMSM 的磁场定向控制
此示例采用磁场定向控制 (FOC) 方法来控制三相永磁同步电机 (PMSM) 的转速。FOC 算法需要转子位置反馈,通过使用霍尔传感器获得该反馈。有关 FOC 的详细信息,请参阅磁场定向控制。
端口
输入
输出
参数
扩展功能
版本历史记录
在 R2020a 中推出