Extended EMF Observer
库:
Motor Control Blockset /
Sensorless Estimators
描述
Extended EMF Observer 模块会计算电气位置 θe(或 sin θe 和 cos θe),此外还根据静止 αβ 参考系中测得的电压和电流计算 PMSM 的机械转速。
该模块包括线性扩展电动势状态观测器,用于估计扩展反电动势。它使用低通滤波器来去除估计的反电动势值中的任何噪声。此外,该模块还包括一个基于转速前馈的正交锁相环 (PLL),用作转速观测器。转速观测器使用计算出的扩展反电动势来确定电机转速。它计算速度的误差为零,即使在恒定角加速度的情况下也是如此。然后,该模块根据估计的电机电角速度计算位置输出。

此外,您还可以使用高级选项来启用 ParameterBus 输入端口,该端口可与 Compute Parameter 模块结合使用,以便在运行时以最佳方式更新模块参数。当电机参数可能随时间变化时(例如,构建可能需要在运行时更换电机的应用时),您可以使用此功能。
方程
IPMSM 状态方程定义为:
下列方程描述降阶的 PMSM 状态模型:
扩展反电动势
以下方程描述降维状态观测器:
下列方程描述扩展的电动势观测器参数:
为确保收敛,如果将 和 α 设置为负值,则扩展电动势观测器增益可由下式确定:
其中:
、 且 。
.
、 且 。
、 且 。
、 且 。
注意
A 和 C 是一个可观察对组。
“”和“”分别是一阶和二阶微分运算子。
vα 和 vβ 分别是沿 α 和 β 轴的定子电压。
iα 和 iβ 分别是沿 α 和 β 轴的定子电流。
eα 和 eβ 分别是沿 α 和 β 轴的扩展反电动势。
id 和 iq 分别是沿 d 和 q 轴的定子电流。
R 是 PMSM 的定子电阻。
Ld 和 Lq 分别是跨 d 和 q 轴的 PMSM 定子电感。
KE 是电动势常量
ωre 是电角处的角速度。
θre 是电角处的转子位置。
是估计值。
ξ 是反馈增益。
示例
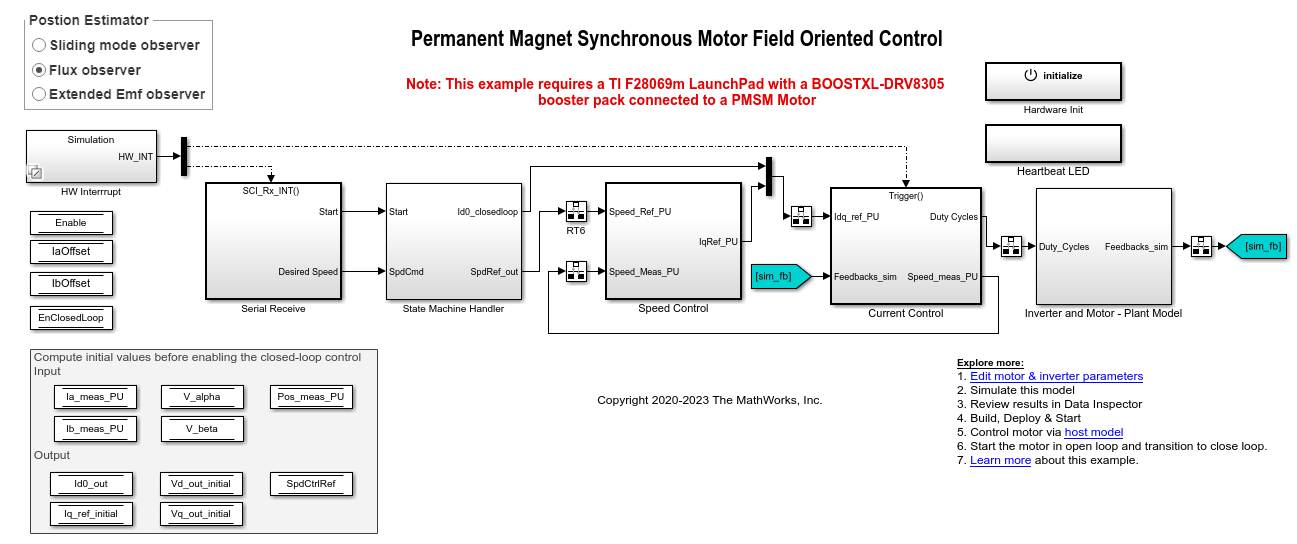
PMSM 的无传感器磁场定向控制
此示例采用磁场定向控制 (FOC) 方法来控制三相永磁同步电机 (PMSM) 的转速。有关 FOC 的详细信息,请参阅磁场定向控制。
端口
输入
输出
参数
参考
[1] Zhiqian Chen, M. Tomita, S. Doki and S. Okuma, "An extended electromotive force model for sensorless control of interior permanent-magnet synchronous motors," in IEEE Transactions on Industrial Electronics, vol. 50, no. 2, pp. 288-295, April 2003, doi: 10.1109/TIE.2003.809391.
[2] T. Ohnuma, S. Doki and S. Okuma, "Extended EMF observer for wide speed range sensorless control of salient-pole synchronous motor drives," The XIX International Conference on Electrical Machines - ICEM 2010, Rome, Italy, 2010, pp. 1-6, doi: 10.1109/ICELMACH.2010.5608087.
[3] G. Liu, H. Zhang and X. Song, "Position-Estimation Deviation-Suppression Technology of PMSM Combining Phase Self-Compensation SMO and Feed-Forward PLL," in IEEE Journal of Emerging and Selected Topics in Power Electronics, vol. 9, no. 1, pp. 335-344, Feb. 2021, doi: 10.1109/JESTPE.2020.2967508.
扩展功能
版本历史记录
在 R2023a 中推出