滑动模式观测器
计算转子的电气位置和机械转速
库:
mcbpositiondecoderlib /
Archive
描述
Sliding Mode Observer 模块通过使用静止 αβ 参考系的 α- 轴与 β 轴上的单位电压和电流值来计算 PMSM 的电气位置和机械转速。
方程
以下方程描述模块对电气位置和机械转速的计算。
以下方程通过使用标幺值来描述离散时间滑动模式观测器运算:
其中:
是 α 轴的定子反电动势和电流。
是 β 轴的定子反电动势和电流。
是定子电源电压。
是定子电阻。
是定子电感。
是永磁体产生的磁链。
是电角速度。
是转子的电气位置。
是时间。
是采样周期。
是采样计数。
是对应于 1 标幺的标称电压。
是对应于 1 标幺的标称电流。
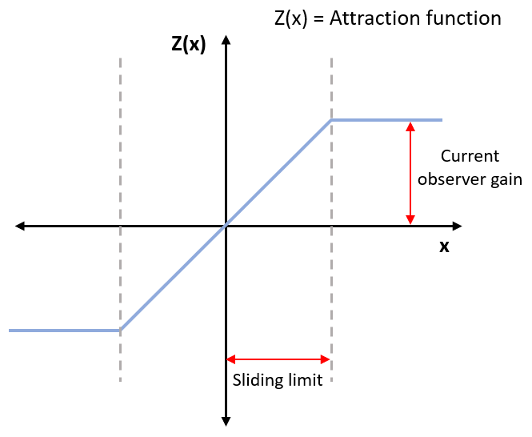
是吸引函数。
是滤波器的截止频率,以周期数/采样为单位。
是截止频率,以周期数/秒为单位。
是采样频率,以采样数/秒为单位。
是估计的反电动势。
调节
使用电流观测器增益和滑模面限值参数来调节该模块。
为了提高稳定性,请增大滑模面限值或减小电流观测器增益值。
要减少变形,请减小电流观测器增益或增大滑模面限值值。
示例
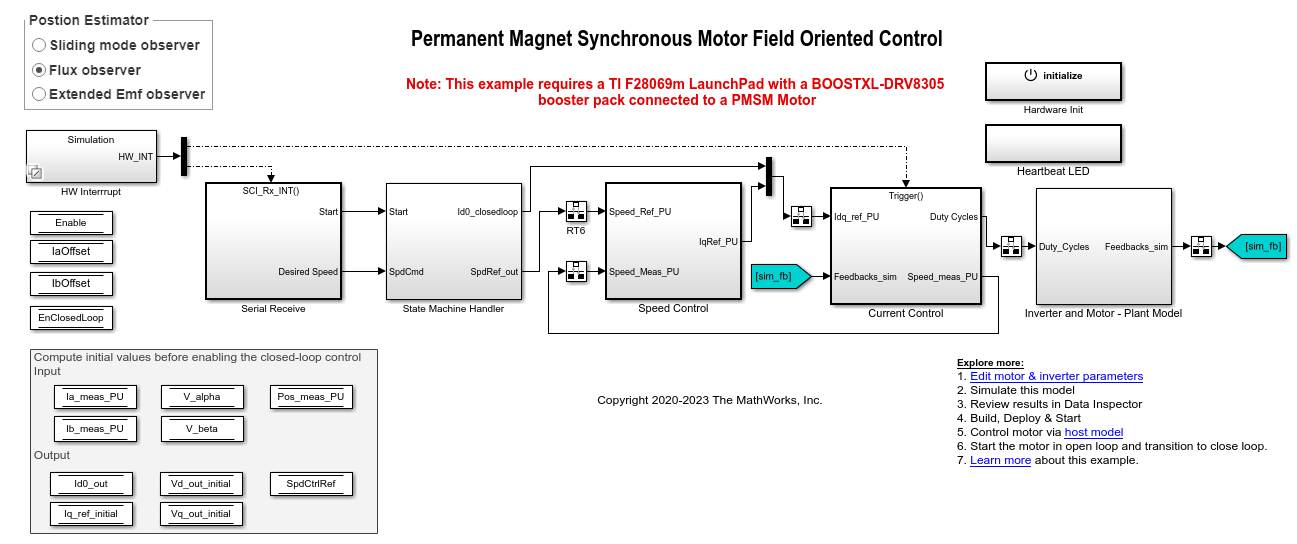
PMSM 的无传感器磁场定向控制
此示例采用磁场定向控制 (FOC) 方法来控制三相永磁同步电机 (PMSM) 的转速。有关 FOC 的详细信息,请参阅磁场定向控制。
端口
输入
输出
参数
参考
[1] Y. Kung, N. V. Quynh, C. Huang and L. Huang, "Design and simulation of adaptive speed control for SMO-based sensorless PMSM drive," 2012 4th International Conference on Intelligent and Advanced Systems (ICIAS2012), Kuala Lumpur, 2012, pp. 439-444 (doi: 10.1109/ICIAS.2012.6306234)
[2] Zhang Yan and V. Utkin, "Sliding mode observers for electric machines-an overview," IEEE 2002 28th Annual Conference of the Industrial Electronics Society. IECON 02, Sevilla, 2002, pp. 1842-1847 vol.3. (doi: 10.1109/IECON.2002.1185251)
[3] T. Bernardes, V. F. Montagner, H. A. Gründling and H. Pinheiro, "Discrete-Time Sliding Mode Observer for Sensorless Vector Control of Permanent Magnet Synchronous Machine," in IEEE Transactions on Industrial Electronics, vol. 61, no. 4, pp. 1679-1691, April 2014 (doi: 10.1109/TIE.2013.2267700)
[4] Z. Guo and S. K. Panda, "Design of a sliding mode observer for sensorless control of SPMSM operating at medium and high speeds," 2015 IEEE Symposium on Sensorless Control for Electrical Drives (SLED), Sydney, NSW, 2015, pp. 1-6. (doi: 10.1109/SLED.2015.7339255)
扩展功能
版本历史记录
在 R2020a 中推出