Pulsating High Freq Observer
库:
Motor Control Blockset /
Sensorless Estimators
描述
Pulsating High Frequency Observer 模块通过使用脉动高频 (PHF) 注入和双脉冲 (DP) 方法来估计静止的内部 PMSM 的初始位置(以电弧度为单位)。此外,该模块还使用(低速)闭环控制检测转子运行时的实时位置。
有关模块算法的详细信息,请参阅算法。
示例
Estimate Initial Rotor Position Using Pulsating High-Frequency and Dual-Pulse Methods
Estimates the initial position (in electrical radians) of a stationary interior PMSM by using pulsating high-frequency (PHF) injection and dual pulse (DP) techniques.
端口
输入
输出
参数
算法
该模块使用开环脉动高频 (PHF) 注入来确定转子位置的最佳可能初始估计值,并使用该值运行闭环 PHF。
该模块通过将高频信号注入估计的转子位置来执行闭环 PHF,以在不旋转电机的情况下确定实际转子位置。当电机凸极率 (Lq/Ld) 大于 1 时,可以使用这种方法。由于 PHF 方法的局限性,估计的位置可能显示与 π (pi) 值相等的模糊性。双脉冲 (DP) 方法使用极性检测来解决 π 的模糊性,如果存在误差,则应用 π 的补偿。估计的转子位置范围是从 0 到 2π 电弧度。
模块可以在以下两个阶段运行:
阶段 1 - 初始位置估计 (IPE),包括三个部分。
阶段 2 - 闭环脉动高频 (PHF) 注入。
在阶段 1 完成后,您可以继续运行阶段 2 中的模块,在此阶段中,它计算转子位置,同时电机使用闭环控制(例如磁场定向控制,即 FOC)运行。使用阶段 2 算法(闭环 PHF 注入),模块可以继续注入脉动高频(如 B 部分所述),并使用所得定子电流响应的数值分析来计算和跟踪闭环运行期间的转子位置。
第一阶段的重点是确定转子处于静态时的初始位置。此阶段包括以下三个部分。
该模块使用 PHF 注入方法。PHF 注入需要初始估计值来开始算法。
如果对所有可能的实际转子位置仅使用一个初始估计值 θi_est(对于 PHF),则当电机凸极率较低时,模块算法可能无法准确确定某些实际转子位置。这些存在模糊性的位置有:
当 θactual 位于范围 内时
当 θactual 位于范围 内时
当 θactual 位于范围 内时
为了使 PHF 适用于低凸极率电机,该模块针对不同实际转子位置选择不同初始估计值。
该模块从以下三个备选方案中选择最佳的可能初始估计值:
θi_est =
0θi_est =
2π/3θi_est =
-2π/3
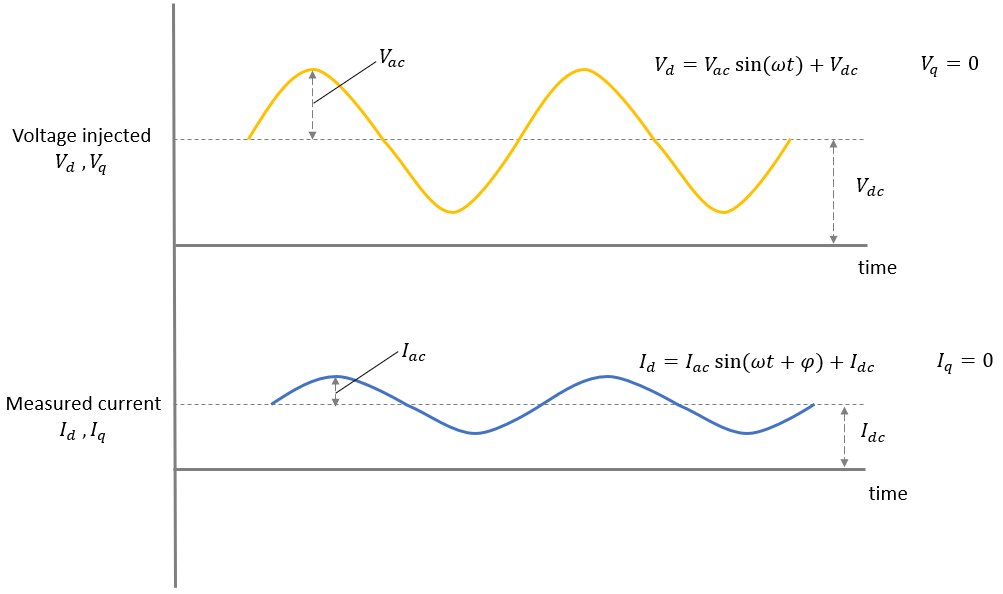
因此,该模块在前面的 3 个 θi_est 值上顺序注入三个高频电压信号(具有相同的峰值振幅 Vphf 和相同的频率 fh),并测量产生的 iq 电流。
注意
在 A 部分中,每次高频电压信号注入都会持续一段固定的时间(开环持续时间(秒) 参数)。此外,两次连续注入之间有固定的延迟(空闲时间(秒) 参数)。
以下方程描述估计的 d-q 参考系中的注入电压:
以下方程描述估计的 α-β 参考系中的注入电压:
以下方程描述实际 d-q 参考系中的注入电压:
使用 IPMSM 电机动态方程,我们可以推导出适用于生成的 iq 电流的以下方程:
因此,
其中:
θi_est 是转子位置的初始估计值(该值可以是
0、2π/3或-2π/3)(以度、标幺或弧度为单位)。θactual 是实际转子位置(以度、标幺或弧度为单位)。
θerr = θactual-θi_est(以度、标幺或弧度为单位)。
Ld 和 Lq 是 IPMSM 的 d 轴和 q 轴电感。
Vd_est 和 Vq_est 是估计的 d-q 参考系的 d 轴和 q 轴上注入的电压。
Vd 和 Vq 是实际 d-q 参考系的 d 轴和 q 轴上注入的电压。
Vα 和 Vβ 是在静止 α-β 参考系的 α 轴和 β 轴上注入的电压。
使用:
iq1 = iq_peak(对于 θi_est = 0)
iq2 = iq_peak(对于 θi_est =
2π/3)iq3 = iq_peak(对于 θi_est =
-2π/3)
对于 θi_est = 0,如果 θactual 从 0 变为 2π,则当转子位于以下四个突出显示的区域时, 是 iq1、iq2 和 iq3 电流峰值之间的最大值。
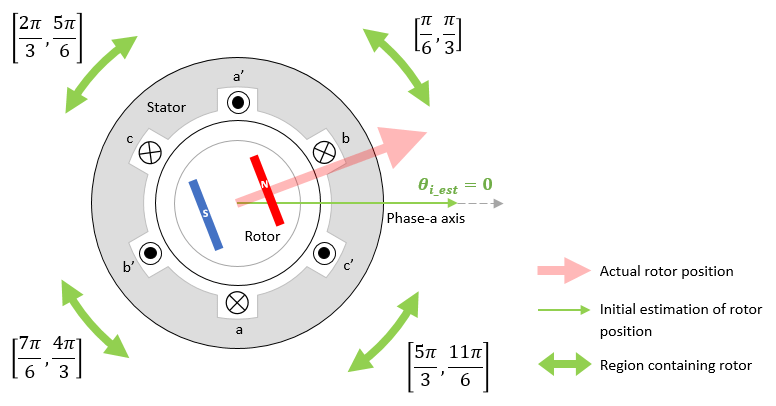
如果 θi_est = 0 用于所有 θactual = 0 至 2π,则该算法对于以下具有模糊性的区域会失败(当电机凸极率低时):
θactual 位于范围 内
θactual 位于范围 内
θactual 位于范围 内
由于上述四个区域中不存在这些具有模糊性的区域,因此您可以消除算法可能失败的区域。
对于 θi_est = (2π/3),如果 θactual 从 0 变为 2π,则当转子位于以下四个突出显示的区域时, 是 iq1、iq2 和 iq3 电流峰值之间的最大值。
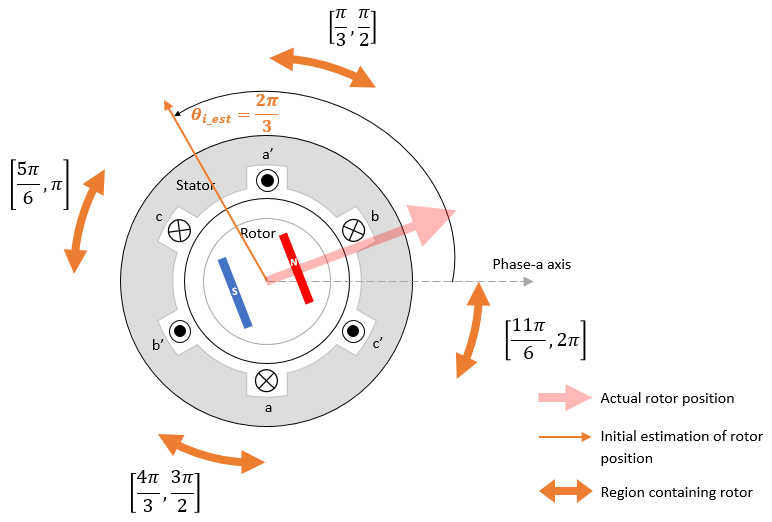
如果 θi_est = (2π/3) 用于所有 θactual = 0 到 2π,则该算法对于以下具有模糊性的区域会失败(当电机凸极率低时):
θactual 位于范围 内
θactual 位于范围 内
θactual 位于范围 内
由于上述四个区域中不存在这些具有模糊性的区域,因此您可以消除算法可能失败的区域。
对于 θi_est = -(2π/3),如果 θactual 从 0 变为 2π,则当转子位于以下四个突出显示的区域时, 是 iq1、iq2 和 iq3 电流峰值之间的最大值。

如果 θi_est = -(2π/3) 用于所有 θactual = 0 到 2π,则该算法对于以下具有模糊性的区域会失败(当电机凸极率低时):
θactual 位于范围 内
θactual 位于范围 内
θactual 位于范围 内
由于上述四个区域中不存在这些具有模糊性的区域,因此您可以消除算法可能失败的区域。
因此,使用这种方法时,有三组区域对应于三个不同的初始估计值。这三组区域覆盖了转子可能位于的所有电机扇区:
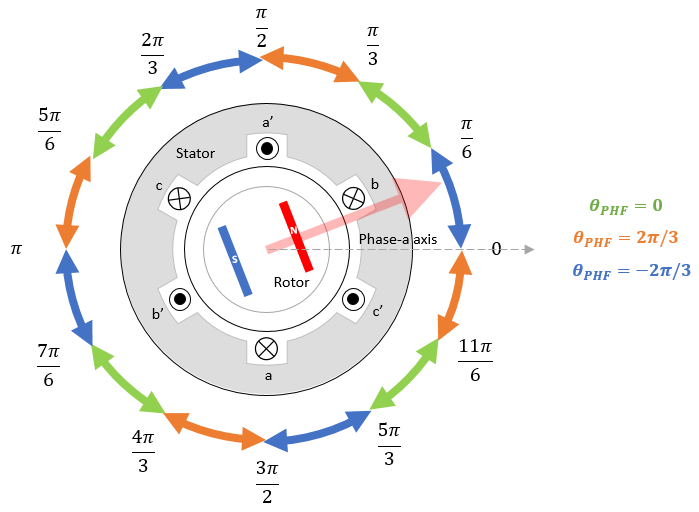
在 A 部分中,模块选择与 B 部分的 iq1、iq2 和 iq3 之间的最大 iq 峰值电流值对应的 θi_est。
在确定最佳初始估计值 θi_est 后,模块沿最终值 (θest | t = 0) = θi_est 注入正弦高频电压(峰值振幅为 Vphf,频率为 fh),并读取电机的 q 轴电流响应,如 A 部分中所述。但除此之外,它还对 q 轴电流响应应用信号处理例程,以在闭环配置中使用 PI 控制器对 θest 进行修正,如下图所示:
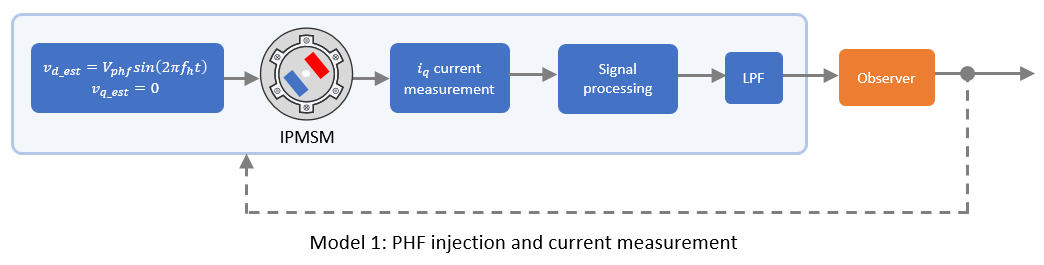
以下步骤描述模块使用的信号处理例程:
将测得的 iq 乘以余弦信号(具有单位振幅和频率 fh),得到如下信号:
应用低通滤波器 (LPF) 以提取上述结果中的偏置项。
对步骤 2 的输出求逆。
根据前面 3 个步骤的输出,我们可以推断出以下误差信号:
由于我们可以将 sin(θ) 逼近为 θ(当 θ 接近于零时),因此在考虑到 θerr 接近于零时,我们可以推断出以下逼近的误差信号:
因此,使用前面的结果,我们可以简化模型 1,如下所示:
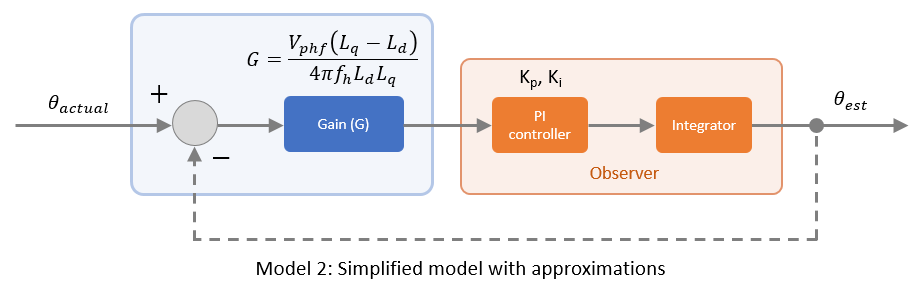
以下项表示整个模型的传递函数(简化):
其中,kp 和 ki 为 PI 控制器的比例增益和积分增益。
因此,当模块执行时,估计的位置最初是 θi_est,但它会稳定上升(根据 G、kp 和 ki 增益动态上升)并在某个角度(相对于 a 轴)达到饱和,使得 Error_signal 接近于零。
注意
在 B 部分中,高频电压信号注入在给定的时间段(闭环持续时间(秒) 参数)内发生。选择此持续时间,使 θest 的动态特性达到饱和。
先前使用的逼近在 PHF 方法中引入了限制,由于有此限制,该算法可能以 π 的模糊度计算转子位置。如果转子位于 电弧度范围内(区域 1),则估计的位置是准确的(不需要 π 补偿)。

如果转子位于 电弧度范围内(区域 2),则估计的位置具有 π 的模糊度(需要 π 补偿)。

因此,模块使用双脉冲方法来确定估计的位置是否需要 π 补偿。
模块会在以下位置注入两个持续时间非常短的电压脉冲(宽度和幅值相同):
B 部分中估计的转子位置处的脉冲 1
B 部分中估计的转子位置处的脉冲 2 +
π
由于脉冲宽度很短,电机不运转,在脉冲注入后转子保持静止。
由此产生的定子磁通量和转子永磁体之间的交互导致沿转子 d 轴的两个电流冲激快速上升和下降。
由于定子芯经过饱和处理,它表现出非线性行为。如果 Ld 值比较小,则会导致较高的电流 Id,如果 Ld 值较高,则会导致较小的电流 Id。因此,脉冲 1 和脉冲 2 生成的 Id 电流冲激显示不同峰值。
注意
注入电压脉冲的脉冲持续时间足够大,可以获得峰值电流值之间的可测量差异。同时,持续时间不能太长,因为当脉冲持续时间超出一定限制时转子可能就会开始旋转。
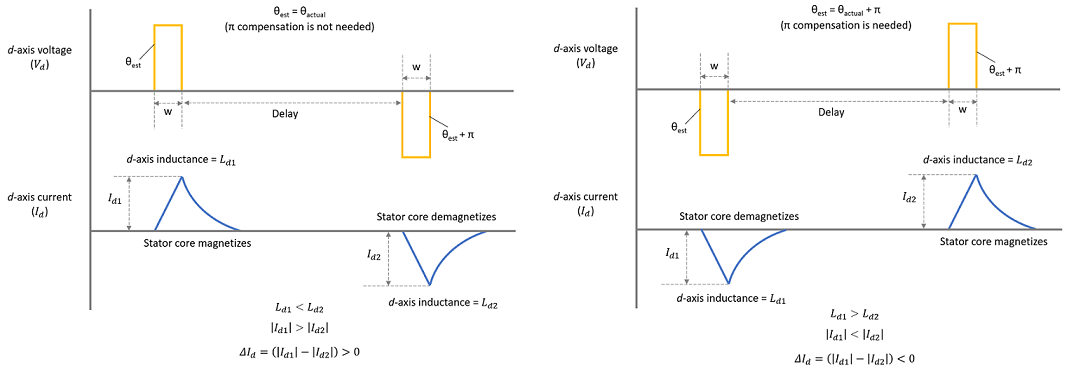
该模块会计算两个电流冲激的峰值之差 ΔId,以确定 A 部分中估计的位置是否需要 π 补偿。
ΔId = |Id1| - |Id2|
PHF 注入有利于需要转子保持静止或需要在不启动电机的情况下进行位置估计的用例。PHF 注入方法也有利于需要避免开环运行来估计位置(在转换为闭环转速控制之前)或需要电机在闭环模式下直接启动的情况。阶段 1 算法中的模块算法通过在保持转子静止和避免开环运行的同时估计位置来处理这些用例。
参考
[1] W. Zine, L. Idkhajine, E. Monmasson, Z. Makni, P. Chauvenet, B. Condamin, and A. Bruyere, "Optimisation of HF signal injection parameters for EV applications based on sensorless IPMSM drives", IET Electric Power Applications, Volume 12, Issue 3, March 2018, p. 347 - 356 (doi:10.1049/iet-epa.2017.0228).
[2] Gaolin Wang, Guoqiang Zhang, and Dianguo Xu, "Position Sensorless Control Techniques for Permanent Magnet Synchronous Machine Drives", Springer, Singapore, 2020 p. 41 - 43 (doi: https://doi.org/10.1007/978-981-15-0050-3).
扩展功能
版本历史记录
在 R2022b 中推出