Six Step Commutation
生成用于无刷 DC (BLDC) 电机的六步换相的开关序列
库:
Motor Control Blockset /
Controls /
Control Reference
描述
Six Step Commutation 模块使用 120 度导通模式来生成开关序列,以在三相 BLDC 电机上实现六步换相(或梯形换相)。您可以使用开关信号来操作开关和控制定子电流,从而控制电机转速和旋转方向。
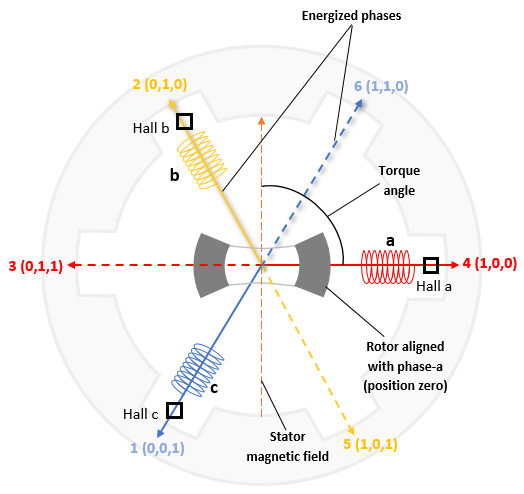
该模块接受霍尔序列号或转子位置(来自霍尔传感器或正交编码器等位置传感器)和转矩方向作为输入。它使用霍尔序列或位置输入来确定转子所在的扇区。该模块会计算开关序列,使其激励对应的相位,以保持 90 度的转矩角(转子 d 轴和定子磁场之间的角度)(偏差为 30 度)。例如,如下图所示,对于霍尔状态 5,模块会触发 A 相和 C 相以旋转电机。
此图是显示定子磁场相量及其默认霍尔序列的示例。建议您使用BLDC 电机的霍尔传感器序列校准获得霍尔序列,并将该霍尔序列用于该模块以实现六步换相。
该模块使用基于霍尔序列的换相逻辑来生成开关序列。
| 霍尔状态(霍尔 a、霍尔 b、霍尔 c) | 开关序列 (AA' BB' CC') | ||
|---|---|---|---|
| AA' | BB' | CC' | |
| 4 (100) | 00 | 10 | 01 |
| 6 (110) | 01 | 10 | 00 |
| 2 (010) | 01 | 00 | 10 |
| 3 (011) | 00 | 01 | 10 |
| 1 (001) | 10 | 01 | 00 |
| 5 (101) | 10 | 00 | 01 |
下图显示定子磁场相量以及可能的扇区(根据输入转子位置确定)。
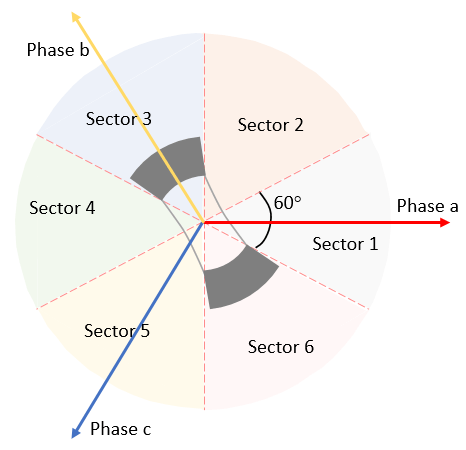
该模块使用基于位置传感器信号的换相逻辑来生成开关序列。
| 位置 (θ) | 扇区 | 开关序列 (AA' BB' CC') | ||
|---|---|---|---|---|
| AA' | BB' | CC' | ||
| (-30°, 30°] | 1 | 00 | 10 | 01 |
| (30°, 90°] | 2 | 01 | 10 | 00 |
| (90°, 150°] | 3 | 01 | 00 | 10 |
| (150°, 210°] | 4 | 00 | 01 | 10 |
| (210°, 270°] | 5 | 10 | 01 | 00 |
| (270°, 330°] | 6 | 10 | 00 | 01 |

示例

使用传感器反馈对 BLDC 电机进行六步换相
使用六步换相法来控制三相 BLDC 电机的转速和旋转方向。
端口
输入
输出
参数
扩展功能
版本历史记录
在 R2020b 中推出