I-F Controller
Implement I-F control for a three-phase permanent magnet synchronous motor
Since R2024a
Libraries:
Motor Control Blockset /
Controls /
Controllers
Description
The I-F Controller block implements I-F control based sensorless startup algorithm for a three-phase permanent magnet synchronous motor (PMSM).
Similar to the VbyF Controller block, the I-F Controller block enables sensorless motor startup, however, I-F Controller generates a higher startup torque in the motor.
The block computes the d- and q-axis reference currents along with reference electrical position for the PMSM. It accepts electrical position, q-axis current, as well as reference and actual mechanical speeds as inputs. To reduce power consumption at start-up, the block also provides an option to maintain a constant ratio between mechanical power and reactive power.
The block supports both the SI unit and per-unit (PU) systems. For more information about the per-unit system, see Per-Unit System.
In addition, you can use the advanced options to enable the ParameterBus input port, which you can use with the Compute Parameter block to update the block parameters optimally at run-time. You can use this functionality when motor parameters can change over time, for example, while building applications that may require swapping of motors at run-time.
For information about the block algorithm, see Algorithm.
Examples
Sensorless Field-Oriented Control of PMSM Using I-F Control-Based Startup
Implements field-oriented control (FOC) using sensorless position estimation and I-F control-based startup to control the speed of a three-phase permanent magnet synchronous motor (PMSM).
Ports
Input
Output
Parameters
Algorithms
The following equations explain the I-F control algorithm used by the block for a PMSM.
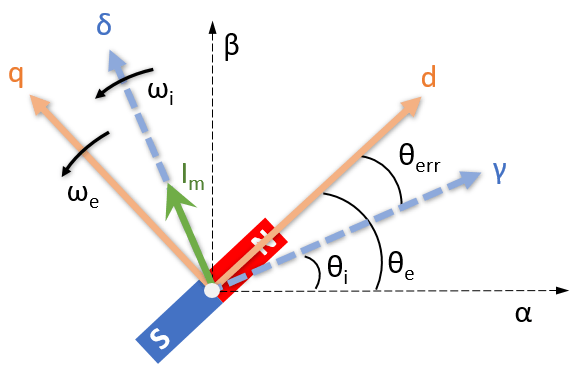
The preceding figure explains the I-F control operation. It shows the γ-ẟ rotating orthogonal axes (aligned with assumed rotor position), the d-q axes in the rotating reference frame, and the stationary α-β reference frame.
The following equation describes the electrical torque of PMSM when I-F control is active:
The mechanical equation of PMSM is
During steady state operation:
The following equation describes the relationship between θerr and Im:
where:
Te is the electromagnetic torque of the motor (in Nm).
Tl is the load torque of the motor (in Nm).
p is the number of pole pairs of the motor.
λpm is the permanent magnet flux linkage (in Weber).
id is the motor current along the d-axis of the d-q rotating reference frame (in amperes).
iq is the motor current along the q-axis of the d-q rotating reference frame (in amperes).
Ld is the d-axis inductance of the motor (in henries).
Lq is the q-axis inductance of the motor (in henries).
Im is the current injected by the I-F control algorithm (in amperes).
θe is the actual rotor position (in radians).
θi is the assumed (reference) rotor position (in radians).
θerr is the difference between the actual and assumed rotor position (in radians).
ωe is the electrical speed of the motor (in rad/s).
J is the motor inertia (in kgm^2)
B is the friction constant (in Nms).
When using this algorithm, the magnitude of the starting current determines the maximum electrical torque that the I-F control algorithm can generate.
The preceding equations also show that a very high acceleration value can affect the stability of I-F control. The error between actual and assumed motor position depends on the magnitude of the supplied current.
The following image shows the operation of the I-F control, which begins with motor-start followed by transition from I-F to closed-loop control and from closed-loop to I-F control.
![]()
The I-F control algorithm provides good control over torque during motor startup. The control algorithm starts the motor without any current overshoots as well as provides a smooth I-F control to closed-loop control transition.
References
[1] Z. Wang, K. Lu and F. Blaabjerg, "A Simple Startup Strategy Based on Current Regulation for Back-EMF-Based Sensorless Control of PMSM," in IEEE Transactions on Power Electronics, vol. 27, no. 8, pp. 3817-3825, Aug. 2012, doi: 10.1109/TPEL.2012.2186464.
[2] A. Borisavljevic, H. Polinder and J. A. Ferreira, "Realization of the I/f control method for a high-speed permanent magnet motor," The XIX International Conference on Electrical Machines - ICEM 2010, Rome, Italy, 2010, pp. 1-6, doi: 10.1109/ICELMACH.2010.5607892.
[3] S. V. Nair, K. Hatua, N. V. P. R. D. Prasad and D. K. Reddy, "A Quick I--f Starting of PMSM Drive With Pole Slipping Prevention and Reduced Speed Oscillations," in IEEE Transactions on Industrial Electronics, vol. 68, no. 8, pp. 6650-6661, Aug. 2021, doi: 10.1109/TIE.2020.3005070.
[4] Z. Song, W. Yao, K. Lee and W. Li, "An Efficient and Robust I-f Control of Sensorless IPMSM With Large Startup Torque Based on Current Vector Angle Controller," in IEEE Transactions on Power Electronics, vol. 37, no. 12, pp. 15308-15321, Dec. 2022, doi: 10.1109/TPEL.2022.3193565.
Extended Capabilities
Version History
Introduced in R2024a