FOC Default Controller Gains
Compute controller gains for the FOC based algorithms at run time based on empirical method or optimum theory
Since R2023b
Libraries:
Motor Control Blockset /
Controls /
Controllers
Description
The FOC Default Controller Gains block computes controller gains for PI controllers used in the field-oriented control (FOC) based algorithms based on empirical method or optimum theory.
If you select Empirical method option:
The block calculates controller gains using approximation of control loops to a lower-order linear time-invariant system and by applying optimal theories considering the fixed delays in the system.
The block computes the PI controller gains used in the current controller, speed controller, and field-weakening controller using the d-q frame of reference-based motor model. The block uses the function
mcb.getPIControllerParametersinternally to compute the control gains.The block accepts motor parameters along with the current and speed controller sample times to generate a bus containing proportional and integral control gains, which you can use for PI controllers in an FOC-based algorithm.
The block uses the value that you specify at the SlowdownFactor input port to modify the PI gains output to make them less aggressive and slow down the system response.
Note
The block uses empirical calculation to compute the control gains. The gains computed by the block might not be optimal and might require additional tuning to improve dynamic performance.
It is recommended that you use the block inside a triggered subsystem or a slow-running control loop.
The block inputs accept values greater than zero.
If you select Based on optimum theory option:
The block calculates controller gains using approximation of control loops to lower-order linear time-invariant system, and by applying optimal theories with capability to consider any number of delays present in the system (for example, delays due to hardware filters and observers (in case of sensorless FOC)).
The block uses:.
Modulus optimum theory for calculation of current controller gains
Symmetric optimum theory for calculation of speed controller gains
The block computes the PI controller gains used in the current controller and speed controller using the d-q frame of reference-based motor model. The block uses the function
mcb.CalcFOCGainsinternally to compute the control gains. For more details about the usage of this function and the block, see Obtain Controller Gains to Run Motor Using Field-Oriented Control.The block accepts motor parameters along with the current and speed controller sample times to generate a bus containing proportional and integral control gains, which can be used with PI controllers to implement control algorithms for motor drive systems.
If you select
Per-unitfor Output unit parameter, provide Vbase (in Volts), Ibase (in Amperes) and Nbase (in RPM) as inputs via the corresponding ports.Provide overall time constant value for the delays present in feedback path of current loop and speed loop using the input ports CurrLoopDelay and SpeedLoopDelay respectively.
Examples

Obtain Controller Gains to Run Motor Using Field-Oriented Control
Obtain PI controller gains using Optimum theory for the current control loop and speed control loop in Field Oriented Control (FOC) of a Permanent Magnet Synchronous Motor (PMSM). This example provides multiple options that you can use to obtain PI controller gains:
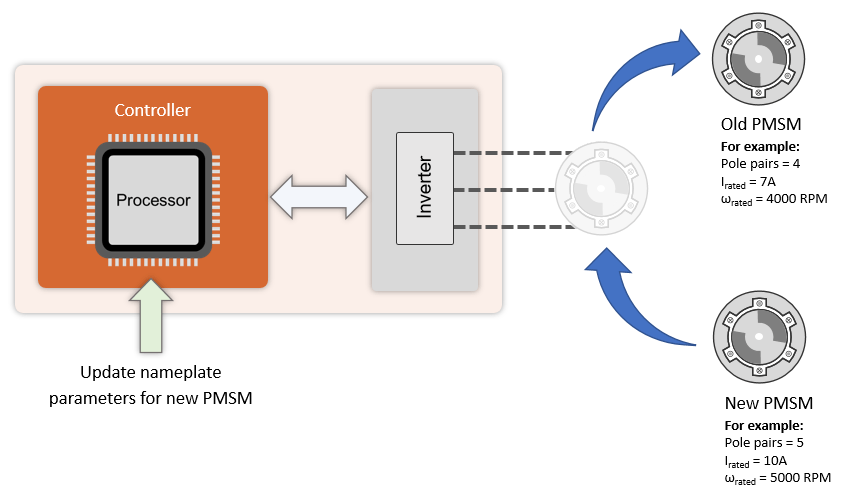
Swap Motors with Single Model Deployment of Sensor-Based FOC Algorithm
Run a permanent magnet synchronous motor (PMSM) in an industrial drive application setup using position-sensor-based field-oriented control (FOC). Industrial drives enable you to swap motors in real-time without repeated deployment of code. An industrial drive setup needs a fixed inverter and software that has the ability to adapt the control algorithm according to the new motor using only the updated nameplate parameters.
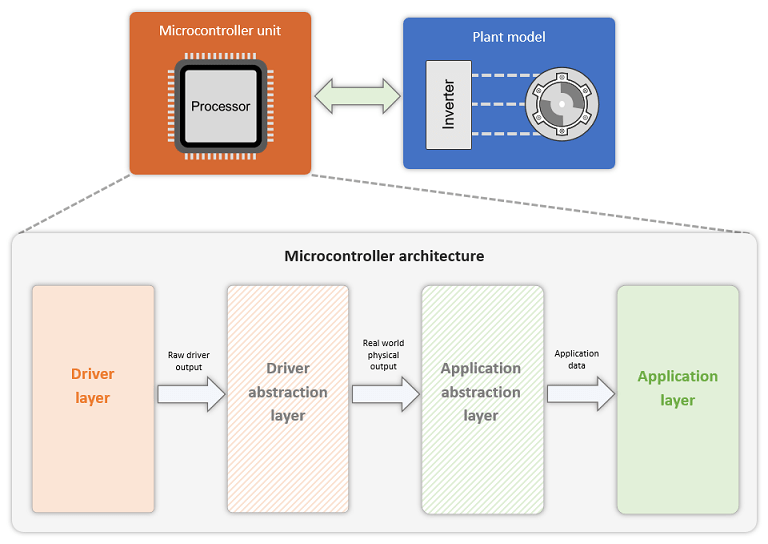
Swap Motors with Single Deployment of Sensorless FOC Algorithm
Run a permanent magnet synchronous motor (PMSM) in an industrial drive application setup using a sensorless field-oriented control (FOC) algorithm. The example uses a sensorless Flux Observer to estimate the motor position. Industrial drives enable you to replace a motor with a new one without repeated deployment of code. An industrial drive setup needs only nameplate parameters to adapt the software to the new motor.
Generate Motor Control Models for Selected Algorithm and Hardware
Use Motor Control Blockset™ to generate a Simulink® model that is configured for a specific hardware and motor control technique.