phased.AlphaBetaFilter
Alpha-beta filter for object tracking
Description
The phased.AlphaBetaFilter object creates an alpha-beta filter designed for
object tracking. Use this tracker for platforms that follow a linear motion model and have a
linear measurement model. Linear motion is defined by constant velocity or constant
acceleration. Use the filter to predict the future location of an object, to reduce noise for
a detected location, or to help associate multiple objects with their tracks.
Creation
Description
abf = phased.AlphaBetaFilterMotionModel property to
'2D Constant Velocity'. In this case, the filter state takes the
form [x; vx; y; vy].
abf = phased.AlphaBetaFilter(Name=Value)Name=Value
pair arguments. Any unspecified properties take default values.
Properties
Object Functions
predict | Predict the state and state estimation error covariance |
correct | Correct the state and state estimation error covariance |
distance | Distances between measurements and predicted measurements |
likelihood | Likelihood of measurement |
clone | Create identical object |
Examples
Apply the alpha-beta filter to track a target moving at constant velocity along the x-axis.
T = 0.1; V0 = 100; N = 100; plat = phased.Platform('MotionModel','Velocity', ... 'VelocitySource','Input port','InitialPosition',[100;0;0]); abfilt = phased.AlphaBetaFilter('MotionModel','1D Constant Velocity'); Z = zeros(1,N); Zp = zeros(1,N); Zc = zeros(1,N); for m = 1:N pos = plat(T,[100+20*randn;0;0]); Z(m) = pos(1); [~,~,Zp(m)] = predict(abfilt,T); [~,~,Zc(m)] = correct(abfilt,Z(m)); end t = (0:N-1)*T; plot(t,Z,t,Zp,t,Zc) xlabel('Time (s)') ylabel('Position (m)') legend('True Track','Predicted Track','Corrected Track', ... 'Location','Best')

Apply the alpha-beta filter to track a target moving at constant acceleration along the x-axis.
T = 0.1; a0 = 100; N = 100; plat = phased.Platform('MotionModel','Acceleration', ... 'AccelerationSource','Input port','InitialPosition',[100;0;0]); abfilt = phased.AlphaBetaFilter( ... 'MotionModel','1D Constant Acceleration', ... 'Coefficients',[0.5 0.5 0.1]); Z = zeros(1,N); Zp = zeros(1,N); Zc = zeros(1,N); for m = 1:N pos = plat(T,[100+20*randn;0;0]); Z(m) = pos(1); [~,~,Zp(m)] = predict(abfilt,T); [~,~,Zc(m)] = correct(abfilt,Z(m)); end t = (0:N-1)*T; plot(t,Z,t,Zp,t,Zc) xlabel('Time (s)') ylabel('Position (m)'); legend('True Track','Predicted Track','Corrected Track', ... 'Location','Best');

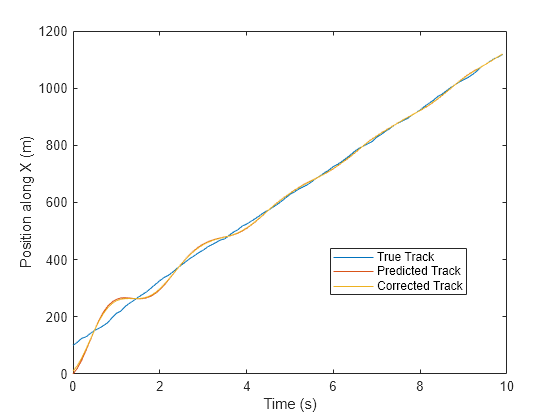
Apply the alpha-beta filter to track a target moving at constant velocity in three dimensions.
T = 0.1; V0 = 100; N = 100; plat = phased.Platform('MotionModel','Velocity', ... 'VelocitySource','Input port','InitialPosition',[100;0;0]); abfilt = phased.AlphaBetaFilter('MotionModel', ... '3D Constant Velocity','State',zeros(6,1)); Z = zeros(3,N); Zp = zeros(3,N); Zc = zeros(3,N); for m = 1:N Z(:,m) = plat(T,[V0+20*randn;0;0]); [~,~,Zp(:,m)] = predict(abfilt,T); [~,~,Zc(:,m)] = correct(abfilt,Z(:,m)); end t = (0:N-1)*T; plot(t,Z(1,:),t,Zp(1,:),t,Zc(1,:)) xlabel('Time (s)') ylabel('Position along X (m)') legend('True Track','Predicted Track','Corrected Track', ... 'Location','Best')
References
[1] Blackman, Multiple-Target Tracking with Radar Applications, Artech House, 1986.
[2] Bar-Shalom et al., Estimation with Applications to Tracking and Navigation, Theory, Algorithms, and Software. John Wiley & Sons, 2001.
Extended Capabilities
Version History
Introduced in R2018b
See Also
predict | correct | distance | likelihood | clone