phased.BeamscanEstimator
Beamscan spatial spectrum estimator for ULA
Description
The phased.BeamscanEstimator
System object™ calculates a beamscan spatial spectrum estimate for a uniform linear array
(ULA). The object estimates the incoming signal spatial spectrum using a narrowband
conventional beamformer.
To estimate the spatial spectrum:
Create the
phased.BeamscanEstimatorobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
estimator = phased.BeamscanEstimator
estimator = phased.BeamscanEstimator(Name,Value)estimator, with each specified property
Name set to the specified Value. You can
specify additional name-value pair arguments in any order as
(Name1,Value1,...,NameN,ValueN).
Properties
Usage
Description
[
returns the directions of arrival, Y,ANG] = estimator(X)ANG, of the signals. To enable
this syntax, set the DOAOutputPort property to
true. ANG is a row vector of the estimated
broadside angles (in degrees). You can specify ANG as single or
double precision. If the object cannot identify a signal direction, it will return
NaN.
Note
The object performs an initialization the first time the object is executed. This
initialization locks nontunable properties
and input specifications, such as dimensions, complexity, and data type of the input data.
If you change a nontunable property or an input specification, the System object issues an error. To change nontunable properties or inputs, you must first
call the release method to unlock the object.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Estimate the DOA's of two signals received by a 10-element ULA with element spacing of 1 meter. The antenna operating frequency is 150 MHz. The actual direction of the first signal is 10° in azimuth and 20° in elevation. The direction of the second signal is 60° in azimuth and -5° in elevation.
Create the signals and array.
fs = 8000; t = (0:1/fs:1).'; x1 = cos(2*pi*t*300); x2 = cos(2*pi*t*400); antenna = phased.IsotropicAntennaElement('FrequencyRange',[100e6 300e6]); array = phased.ULA('Element',antenna,'NumElements',10,'ElementSpacing',1); fc = 150e6; x = collectPlaneWave(array,[x1 x2],[10 20;60 -5]',fc); noise = 0.1*(randn(size(x)) + 1i*randn(size(x)));
Solve for the DOAs.
estimator = phased.BeamscanEstimator('SensorArray',array, ... 'OperatingFrequency',fc,'DOAOutputPort',true,'NumSignals',2); [~,doas] = estimator(x + noise); doas = broadside2az(sort(doas),[20 -5]); disp(doas)
9.5829 60.3813
Because the default values for the ScanAngles property has a granularity of , the DOA estimates are not accurate. Improve the accuracy by choosing a finer grid.
estimator2 = phased.BeamscanEstimator('SensorArray',array, ... 'OperatingFrequency',fc,'ScanAngles',-60:0.1:60, ... 'DOAOutputPort',true,'NumSignals',2); [~,doas] = estimator2(x + noise); doas = broadside2az(sort(doas),[20 -5]); disp(doas)
10.0093 59.9751
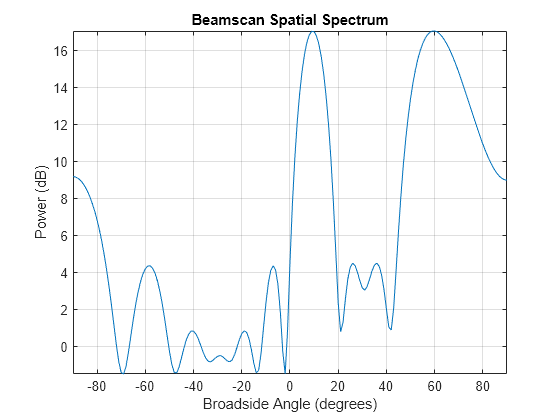
Plot the beamscan spectrum
plotSpectrum(estimator)
Algorithms
References
[1] Van Trees, H. Optimum Array Processing. New York: Wiley-Interscience, 2002, pp. 1142–1143.
Extended Capabilities
Version History
Introduced in R2011a