GPU Constant Gamma Clutter
Constant gamma clutter simulation using gpu
Libraries:
Radar Toolbox
Description
The GPU Constant Gamma Clutter block generates, using a graphical processing unit (GPU), constant gamma clutter reflected from a homogeneous terrain for a monostatic radar transmitting a narrowband signal into free space. The radar is assumed to be at a constant altitude moving at a constant speed.
Ports
Input
Output
Parameters
Main Tab
Clutter model parameter, specified as a scalar. This parameter contains the value used in the constant clutter model. The value depends on both terrain type and the operating frequency. Units are in dB.
Example: -5.0
Data Types: double
Specify the earth model used in clutter simulation as
Flat or
Curved. When you set this parameter to
Flat, the earth is assumed to be a plane.
When you set this parameter to Curved, the
earth is assumed to be spherical.
Specify the minimum range for the clutter simulation as a positive scalar. The minimum range must be nonnegative. Units are in meters.
Specify the maximum range for the clutter simulation as a positive
scalar. The maximum range must be greater than the value specified in
the Radar height parameter. Units are in
meters.
The azimuth angle in the ground plane about which clutter patches are generated. Patches are generated symmetrically about this angle. Units are in degrees.
Specify the azimuth span of each clutter patch as a positive scalar. Units are in degrees. Units are in degrees.
Azimuth span of each clutter patch, specified as a positive scalar. Units are in degrees.
Data Types: double
Coherence time for the clutter simulation, specified as a positive
scalar. After the coherence time elapses, the block updates the random
numbers it uses for the clutter simulation at the next pulse. When you
use the default value of Inf, the random numbers are
never updated. Units are in seconds.
Example: 4
Data Types: double
Clutter sample rate, specified as a positive scalar. Units are in Hertz.
Example: 10e6
Data Types: double
Pulse repetition frequency, PRF, specified as a positive scalar or a row vector of positive values. Units are in Hertz.
Example: [1e4,2e4]
Data Types: double
Select this parameter to enable the PRFIdx port.
When enabled, pass in an index into a vector of predefined PRFs. Set predefined PRFs using the Pulse repetition frequency (Hz) parameter.
When not enabled, the block cycles through the vector of PRFs specified by the Pulse repetition frequency (Hz) parameter. If Pulse repetition frequency (Hz) is a scalar, the PRF is constant.
The format of the output signal, specified as Pulses or Samples.
If you set this parameter to Samples, the output of the block consists of multiple samples. The number of samples is the value of the Number of samples in output parameter.
If you set this parameter to Pulses, the output of the block consists of multiple pulses. The number of pulses is the value of the Number of pulses in output parameter.
Number of samples in the block output, specified as a positive integer.
Example: 1000
Dependencies
To enable this parameter, set the Output signal format
parameter to Samples.
Data Types: double
Number of pulses in the block output, specified as a positive integer.
Example: 2
Dependencies
To enable this parameter, set the Output signal
format parameter to
Pulses.
Data Types: double
Radar Tab
Effective radiated power (ERP) of the radar system, specified as a positive scalar. Units are in watts.
Example: 3500
Data Types: double
Height of radar above surface, specified as a nonnegative scalar. Units are in meters.
Example: 50
Data Types: double
Radar platform speed, specified as a nonnegative scalar. Units are in meters per second.
Example: 5
Data Types: double
Specify the direction of radar platform motion as a 2-by-1 real vector
in the form [AzimuthAngle;ElevationAngle]. Units are
in degrees. Both azimuth and elevation angle are measured in the local
coordinate system of the radar antenna or antenna array. Azimuth angle
must be between –180° and 180°. Elevation angle must be
between –90° and 90°.
The default value of this parameter indicates that the radar platform is moving perpendicular to the radar antenna array broadside direction.
Example: [25;30]
Data Types: double
Specify a 3-element vector that gives the intrinsic yaw, pitch, and roll of the sensor frame from the inertial frame. The 3 elements define the rotations around the z, y, and x axes respectively, in that order. The first rotation, rotates the body axes around the z-axis. Because these angles define intrinsic rotations, the second rotation is performed around the y-axis in its new position resulting from the previous rotation. The final rotation around the x-axis is performed around the x-axis as rotated by the first two rotations in the intrinsic system.
Example: [0,-10,4]
Data Types: double
Check box to enable antenna element weights input port,
W.
Sensor Array Tab
Element Parameters
Coordinate system of custom antenna pattern, specified az-el or phi-theta. When you specify az-el, use the Azimuth angles (deg) and Elevations angles (deg) parameters to specify the coordinates of the pattern points. When you specify phi-theta, use the Phi angles (deg) and Theta angles (deg) parameters to specify the coordinates of the pattern points.
Dependencies
To enable this parameter, set Element type to Custom Antenna.
Phi angles of points at which to specify the antenna radiation pattern, specify as a real-valued 1-by-P row vector. P must be greater than 2. Angle units are in degrees. Phi angles must lie between 0° and 360° and be in strictly increasing order.
Dependencies
To enable this parameter, set the Element type parameter to Custom Antenna and the Input Pattern Coordinate System parameter to phi-theta.
Theta angles of points at which to specify the antenna radiation pattern, specify as a real-valued 1-by-Q row vector. Q must be greater than 2. Angle units are in degrees. Theta angles must lie between 0° and 360° and be in strictly increasing order.
Dependencies
To enable this parameter, set the Element type parameter to Custom Antenna and the Input Pattern Coordinate System parameter to phi-theta.
Select this check box to rotate the antenna element pattern to align with the array normal. When not selected, the element pattern is not rotated.
When the antenna is used in an antenna array and the Input Pattern Coordinate System parameter is az-el, selecting this check box rotates the pattern so that the x-axis of the element coordinate system points along the array normal. Not selecting uses the element pattern without the rotation.
When the antenna is used in an antenna array and Input Pattern Coordinate System is set to phi-theta, selecting this check box rotates the pattern so that the z-axis of the element coordinate system points along the array normal.
Use the parameter in conjunction with the Array normal parameter of the URA and UCA arrays.
Dependencies
To enable this parameter, set Element type to Custom Antenna.
Array Parameters
Dimensions of a URA array, specified as a positive integer or 1-by-2 vector of positive integers.
If Array size is a 1-by-2 vector, the vector has the form
[NumberOfArrayRows,NumberOfArrayColumns].If Array size is an integer, the array has the same number of rows and columns.
When you set Specify sensor array as to
Replicated subarray, this parameter applies to each subarray.
For a URA, array elements are indexed from top to bottom along the
leftmost column, and then continue to the next columns from left to right. In this
figure, the Array size value of [3,2] creates an
array having three rows and two columns.

Dependencies
To enable this parameter, set Geometry to URA.
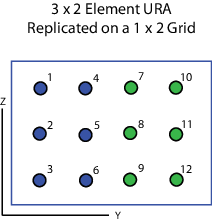
Rectangular subarray grid size, specified as a single positive integer, or a 1-by-2 row vector of positive integers.
If Grid size is an integer scalar, the
array has an equal number of subarrays in each row and column. If Grid
size is a 1-by-2 vector of the form [NumberOfRows,
NumberOfColumns], the first entry is the number of subarrays
along each column. The second entry is the number of subarrays in
each row. A row is along the local y-axis, and
a column is along the local z-axis. The figure
here shows how you can replicate a 3-by-2 URA subarray using a Grid
size of [1,2].
Dependencies
To enable this parameter, set Sensor array to Replicated
subarray and Subarrays layout to Rectangular.
Extended Capabilities
Version History
Introduced in R2021a