constantGammaClutter
Simulate constant gamma clutter
Description
The constantGammaClutter
System object™ simulates constant gamma clutter reflected from homogeneous terrain for a
monostatic radar transmitting a narrowband signal into free space.
constantGammaClutter assumes that:
The radar system is monostatic.
The propagation is in free space.
The terrain is homogeneous.
The clutter patch is stationary during the coherence time. Coherence time indicates how frequently the software changes the set of random numbers in the clutter simulation.
Because the signal is narrowband, the spatial response and Doppler shift can be approximated by phase shifts.
The radar system maintains a constant height during simulation.
The radar system maintains a constant speed during simulation.
To compute the clutter return:
Create the
constantGammaClutterobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
gclutter = constantGammaCluttergclutter. This object simulates the clutter
return of a monostatic radar system using the constant gamma model.
Properties
Usage
Syntax
Description
Y = glclutter(STEERANGLE)STEERANGLE as the input subarray steering angle.
To use this syntax, set the Sensor property to an array
that supports subarrays and set the SubarraySteering
property of the array to either 'Phase' or
'Time'.
Y = gclutter(WS)WS as the input weights applied to each element,
subarray, or element within each subarray. This syntax is available when you set
the WeightsInputPort property to true.
To enable this argument for subarray element weights, also set the
Sensor property to an array that contains subarrays and
set the SubarraySteering property of that array to
'Custom'.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Simulate the clutter return from terrain with a gamma value of 0 dB. The effective transmitted power of the radar system is 5 kW.
Set up the characteristics of the radar system. This system uses a four-element uniform linear array (ULA). The sample rate is 1 MHz, and the PRF is 10 kHz. The propagation speed is the speed of light, and the operating frequency is 300 MHz. The radar platform is flying 1 km above the ground with a path parallel to the ground along the array axis. The platform speed is 2 km/s. The mainlobe has a depression angle of 30°.
Nele = 4; c = physconst('Lightspeed'); fc = 300.0e6; lambda = c/fc; array = phased.ULA('NumElements',Nele,'ElementSpacing',lambda/2); fs = 1.0e6; prf = 10.0e3; height = 1000.0; direction = [90;0]; speed = 2.0e3; depang = 30.0; mountingAng = [depang,0,0];
Create the clutter simulation object. The configuration assumes the earth is flat. The maximum clutter range of interest is 5 km, and the maximum azimuth coverage is ±60°.
Rmax = 5000.0; Azcov = 120.0; tergamma = 0.0; tpower = 5000.0; clutter = constantGammaClutter('Sensor',array,... 'PropagationSpeed',c,'OperatingFrequency',fc,'PRF',prf,... 'SampleRate',fs,'Gamma',tergamma,'EarthModel','Flat',... 'TransmitERP',tpower,'PlatformHeight',height,... 'PlatformSpeed',speed,'PlatformDirection',direction,... 'MountingAngles',mountingAng,'ClutterMaxRange',Rmax,... 'ClutterAzimuthSpan',Azcov,'SeedSource','Property',... 'Seed',40547);
Simulate the clutter return for 10 pulses.
Nsamp = fs/prf; Npulse = 10; sig = zeros(Nsamp,Nele,Npulse); for m = 1:Npulse sig(:,:,m) = clutter(); end
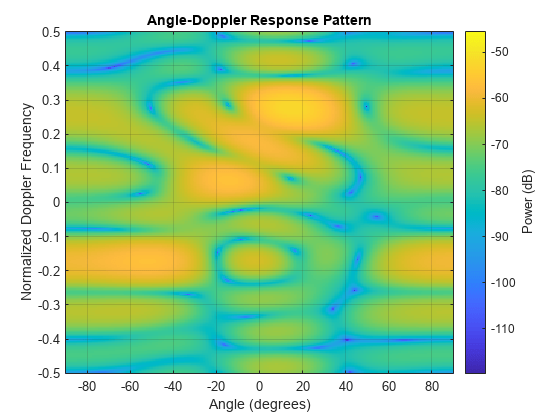
Plot the angle-Doppler response of the clutter at the 20th range bin.
response = phased.AngleDopplerResponse('SensorArray',array,... 'OperatingFrequency',fc,'PropagationSpeed',c,'PRF',prf); plotResponse(response,shiftdim(sig(20,:,:)),'NormalizeDoppler',true)
Simulate the clutter return from terrain with a gamma value of 0 dB. You input the transmit signal of the radar system when creating clutter. In this case, you do not use the TransmitERP property.
Set up the characteristics of the radar system. This system has a 4-element uniform linear array (ULA). The sample rate is 1 MHz, and the PRF is 10 kHz. The propagation speed is the speed of light, and the operating frequency is 300 MHz. The radar platform is flying 1 km above the ground with a path parallel to the ground along the array axis. The platform speed is 2 km/s. The mainlobe has a depression angle of 30°.
Nele = 4; c = physconst('Lightspeed'); fc = 300.0e6; lambda = c/fc; ula = phased.ULA('NumElements',Nele,'ElementSpacing',lambda/2); fs = 1.0e6; prf = 10.0e3; height = 1.0e3; direction = [90;0]; speed = 2.0e3; depang = 30; mountingAng = [depang,0,0];
Create the clutter simulation object and configure it to accept an transmit signal as an input argument. The configuration assumes the earth is flat. The maximum clutter range of interest is 5 km, and the maximum azimuth coverage is ±60°.
Rmax = 5000.0; Azcov = 120.0; tergamma = 0.0; clutter = constantGammaClutter('Sensor',ula,... 'PropagationSpeed',c,'OperatingFrequency',fc,'PRF',prf,... 'SampleRate',fs,'Gamma',tergamma,'EarthModel','Flat',... 'TransmitSignalInputPort',true,'PlatformHeight',height,... 'PlatformSpeed',speed,'PlatformDirection',direction,... 'MountingAngles',mountingAng,'ClutterMaxRange',Rmax,... 'ClutterAzimuthSpan',Azcov,'SeedSource','Property',... 'Seed',40547);
Simulate the clutter return for 10 pulses. At each step, pass the transmit signal as an input argument. The software computes the effective transmitted power of the signal. The transmit signal is a rectangular waveform with a pulse width of 2 μs.
tpower = 5.0e3; pw = 2.0e-6; X = tpower*ones(floor(pw*fs),1); Nsamp = fs/prf; Npulse = 10; sig = zeros(Nsamp,Nele,Npulse); for m = 1:Npulse sig(:,:,m) = step(clutter,X); end
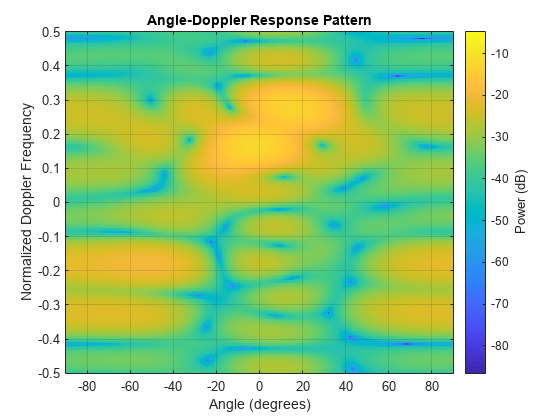
Plot the angle-Doppler response of the clutter at the 20th range bin.
response = phased.AngleDopplerResponse('SensorArray',ula,... 'OperatingFrequency',fc,'PropagationSpeed',c,'PRF',prf); plotResponse(response,shiftdim(sig(20,:,:)),'NormalizeDoppler',true)
More About
References
[1] Barton, David. “Land Clutter Models for Radar Design and Analysis,” Proceedings of the IEEE. Vol. 73, Number 2, February, 1985, pp. 198–204.
[2] Long, Maurice W. Radar Reflectivity of Land and Sea, 3rd Ed. Boston: Artech House, 2001.
[3] Nathanson, Fred E., J. Patrick Reilly, and Marvin N. Cohen. Radar Design Principles, 2nd Ed. Mendham, NJ: SciTech Publishing, 1999.
[4] Ward, J. “Space-Time Adaptive Processing for Airborne Radar Data Systems,” Technical Report 1015, MIT Lincoln Laboratory, December, 1994.
Extended Capabilities
Version History
Introduced in R2021a