toccgh
Compute track probabilities using the CGH algorithm
Description
Examples
The tracker operating characteristic (TOC) curve is a plot of the probability of a target track as a function of the probability of a false track. Plot the TOC curves for three different values of signal-to-noise ratio (SNR) assuming a 2/3 confirmation logic and use a one-dimensional constant-velocity Kalman filter to generate the tracker gate growth sequence.
Compute the probability of detection and the probability of false alarm for SNR values of 3, 6, and 9 dB. Assume a coherent receiver with a nonfluctuating target. Generate 20 probability-of-false-alarm values logarithmically equally spaced between and and calculate the corresponding probabilities of detection.
SNRdB = [3 6 9]; [pd,pfa] = rocsnr(SNRdB,'SignalType','NonfluctuatingCoherent', ... 'NumPoints',20,'MaxPfa',1e-3);
Compute and plot the TOC curves and the corresponding receiver operating characteristic (ROC) curves.
toccgh(pd,pfa)
![]()
Compute the probability of target track, the probability of false track, and the expected number of false tracks corresponding to a probability of detection of 0.9, a probability of false alarm of , and a 3-of-5 track confirmation logic.
pd = 0.9; pfa = 1e-6; logic = [3 5];
Use a modified version of the default one-dimensional constant-velocity Kalman filter to generate the tracker gate growth sequence. Specify an update time of 0.3 second and a maximum target acceleration of 20 meters per square second.
KFpars = {'UpdateTime',0.3,'MaxAcceleration',20};Compute the probabilities and the expected number of false tracks.
[pdf,pft,eft] = toccgh(pd,pfa,'ConfirmationThreshold',logic,KFpars{:})pdf = 0.9963
pft = 2.1555e-19
eft = 1
Use the common gate history algorithm to compute the probability of target track and the probability of track for a probability of detection of 0.5 and a probability of false alarm of . Use a custom gate growth sequence and a confirmation threshold of 3/4.
pd = 0.5; pfa = 1e-3; cp = [3 4]; gs = [21 39 95 125];
Compute the probabilities.
[pdf,pft] = toccgh(pd,pfa,'ConfirmationThreshold',cp, ... 'GateGrowthSequence',gs)
pdf = 0.5132
pft = 9.9973e-07
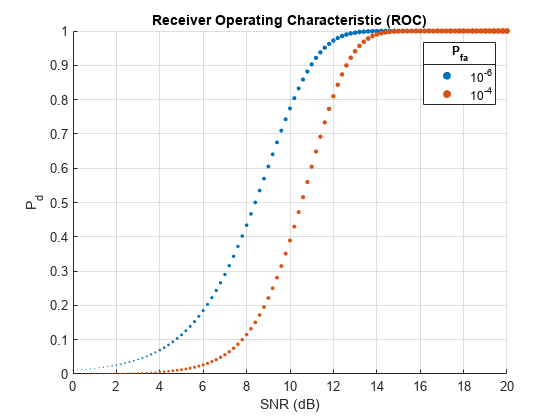
Investigate how receiver operating characteristic (ROC) and tracker operating characteristic (TOC) curves change with the probability of false alarm.
Compute probability-of-detection and signal-to-noise-ratio (SNR) values corresponding to probabilities of false alarm of and . Assume a coherent receiver with a nonfluctuating target. Plot the resulting ROC curves. Use larger markers to denote a larger SNR value.
pfa = [1e-4 1e-6]; [pd,SNRdB] = rocpfa(pfa,'SignalType','NonfluctuatingCoherent'); scatter(SNRdB,pd,max(SNRdB,1),'filled') title('Receiver Operating Characteristic (ROC)') xlabel('SNR (dB)') ylabel('P_d') grid on title(legend('10^{-6}','10^{-4}'),'P_{fa}')
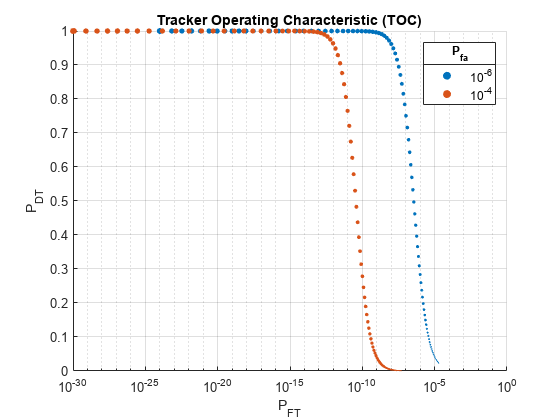
Compute the TOC curves using the probabilities of detection and probabilities of false alarm that you obtained. As the SNR increases, the probability of a false track in the presence of target detection increases. As the SNR decreases, the probability of target detection decreases, thereby increasing the probability of a false track.
[pct,pcf] = toccgh(pd.',pfa); scatter(pcf,pct,max(SNRdB,1),'filled') set(gca,'XScale','log') title('Tracker Operating Characteristic (TOC)') xlabel('P_{FT}') ylabel('P_{DT}') grid on title(legend('10^{-6}','10^{-4}'),'P_{fa}')
Input Arguments
Name-Value Arguments
Output Arguments
More About
References
[1] Bar‐Shalom, Yaakov, Leon J. Campo, and Peter B. Luh. "From Receiver Operating Characteristic to System Operating Characteristic: Evaluation of a Track Formation System." IEEE® Transactions on Automatic Control 35, no. 2 (February 1990): 172–79. https://doi.org/10.1109/9.45173.
[2] Bar-Shalom, Yaakov, Peter K. Willett, and Xin Tian. Tracking and Data Fusion: A Handbook of Algorithms. Storrs, CT: YBS Publishing, 2011.
Extended Capabilities
Version History
Introduced in R2021a